MoonWalker
저희 NTREX는 여러분께 MoonWalker 시리즈라고 이름 붙여진 이 강력한 모터 제어기를 소개할 수 있게 된 것이 정말 기쁩니다. 사용자가 1개 혹은 2개의 DC 모터를 좀 더 강력하게 구동하기 위해 저희 제품을 선택하였다면 아주 올바른 선택이라고 자신합니다. MoonWalker 시리즈는 기본적으로 전류/속도/위치 제어기를 탑재하고 있어서 로봇 팔이나 주행로봇, 산업용 기기 등을 연구용부터 실제 적용까지 아주 광범위한 적용이 가능합니다. 지금부터 MoonWalker DC Motor 시리즈를 소개하도록 하겠습니다.

- 고급형 모바일 플랫폼의 주 제어기로 바로 사용 가능
- 2축 구동형 모바일 로봇의 주행 명령 탑재
- 2축 구동형 모바일 로봇을 조이스틱과 RC 조종기를 이용한 직접 구동 지원
- 조이스틱과 RC 조종기를 사용해서 전압 / 전류 / 속도 제어 설정 가능

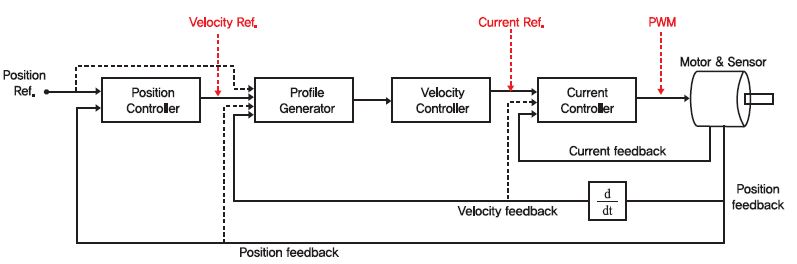
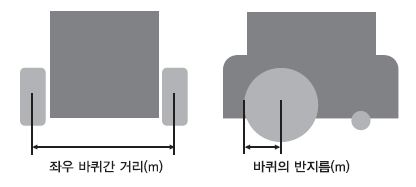
- Incremental Encoder 신호의 피드백을 이용한 정밀한 위치 및 속도 제어 지원
- Absolute Encoder 신호의 피드백을 이용한 정밀한 위치 및 속도 제어 지원
- Tachometer 신호의 피드백을 통한 속도제어 지원
- Potentiometer 신호의 피드백을 통한 위치제어 지원
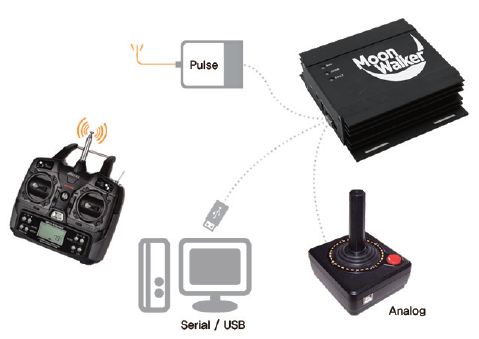
- USB(VCP) / RS-232 통신을 이용한 구동 (통신속도: 9600 ~ 921600 bps)
- CAN 통신을 이용한 구동 (통신속도: 10K ~ 1M bps)
- 조이스틱과 같은 아날로그 신호를 이용한 구동 지원
- RC 조종기와 같은 디지털 신호를 이용한 구동 지원
- Serial 통신/아날로그 신호/디지털 신호 구동시 동시 사용 가능
- 전압을 이용한 Open-Loop 구동 가능
- 조이스틱과 RC 조종기 사용 시 Min/Max 범위 설정과 센터 부근의 Dead-band 영역 설정 가능
- Analog / Pulse Input에 대한 Calibration과 Linearity 설정 가능
- Digital In/Out Port와 Analog/Pulse Input Port 지원
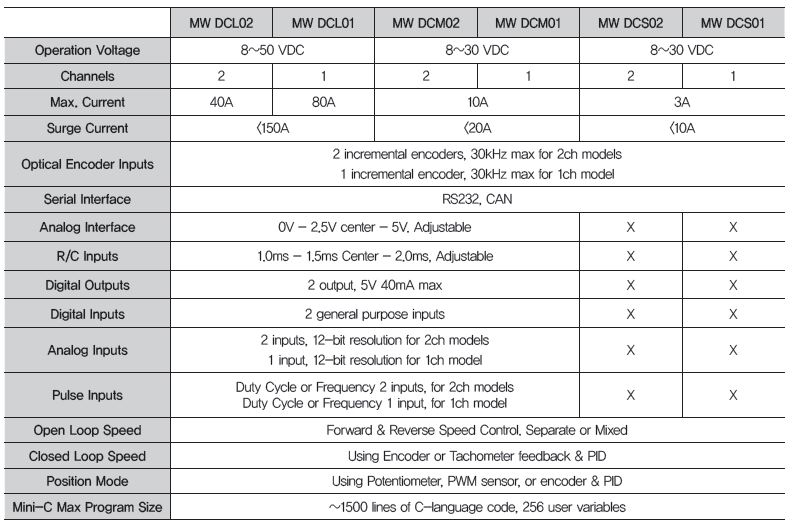
- 내부 변수 및 구동 명령과 외부 IO를 사용할 수 있는 스크립트(Script)를 지원
- 사용자 스크립트 사용 시 내부 변수 모니터링 가능
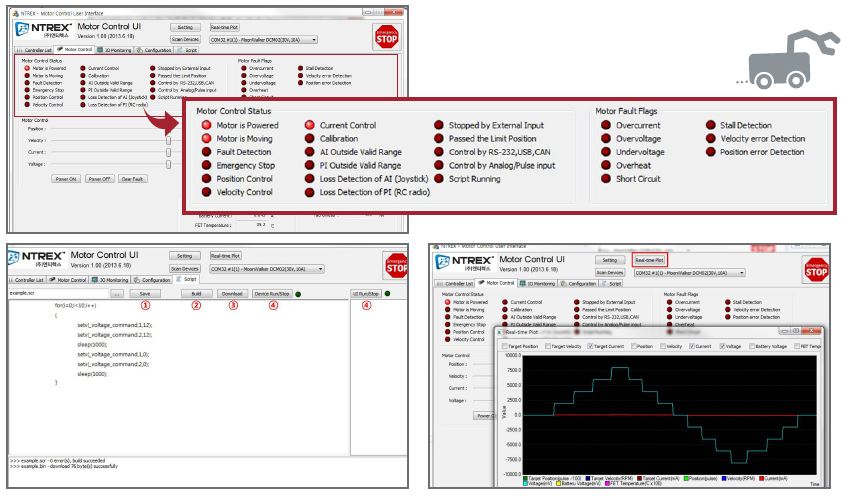
- 제품의 설정과 구동을 편하게 할 수 있는 환경 설정 및 구동용 PC 프로그램 제공
- EEPROM을 이용한 사용자 세팅 값 저장 및 재부팅 시 자동 불러오기
- CAN 통신에서 멀티드롭 연결을 위한 Device ID 최대 255개까지 설정 가능
- Serial 통신 연결 중단 시 모터 정지를 위한 Watchdog Timer 기능
- Serial 통신과 Analog / Pulse Input 명령어 동시 사용 가능
- 배터리 전압 측정 및 제어기의 과전압 / 저전압 보호 기능
- 모터의 전류 측정 및 과전류 보호 기능
- 내부 FET 방열판의 온도 측정을 통해 과열 보호 기능 탑재
- 모터 특성 설정에 따른 정격 전압 / 최고 전류 / 최고 속도 출력 제한
- RGB LED를 사용한 에러, 동작, 통신 상태 표시 가능
[MoonWalker 액세서리] [제품별 데이터 시트] [사용자 매뉴얼] [유틸리티] [펌웨어] [어플리캐이션 노트] [사용상의 기초 팁] [동영상 강의] [MW DCM02 응용예제]