SMART M-TECH SHOW 2014


스마트M테크쇼는 지난 2014년 6월 25일부터~ 27일까지 3일간 서울 코엑스에서 열렸다.
사회 전반의 스마트화 지원을 통해 스마트라이프로의 변화를 선도하는 스마트기술(Smart-Tech) 기반 전문 전시회로 스마트워크/모바일 페어, 스마트라이프 쇼, 스마트러닝 코리아, 스마트카드&결제 박람회로 구성되었다.
미래창조과학부, 매경경제신문사, MBN 주최와 엑스포럼 주관으로 삼성전자, LG전자, 한국 엡손, AJ네트웍스 등 많은 기업이 참가하였다.

전시회 입구에서는 행사 개요, 부스 배치도와 다양한 이벤트 안내를 확인할 수 있었다.
입구에 들어서자 LG전자와 삼성전자의 부스가 나란히 자리 잡고 있었다.
먼저 LG전자 부스를 관람하였다. G3 스마트폰과 전용 케이스인 써클 케이스를 중점으로 전시돼 있고, 한편에는 관련 액세서리인 블루투스 이어폰도 전시되어 있었다.

삼성전자는 가장 최근 발매된 스마트폰인 갤럭시S5와 기어2, 기어 핏 정도만 전시되어 있었다. 갤럭시S5의 광고음악을 계속 틀어놓아 한 번 더 눈길을 가게 하였다.


환경부, 한국환경공단에서 ‘전기자동차’로 즐기는 스마트라이프를 소개했다. 현재 환경부에서는 개인이 전기자동차를 구매할 시 지원금 혜택을 주고 있어 개인 구매자는 기존 차량과 비슷한 가격대로 전기자동차를 구입할 수 있게 된다. 국내에서는 총 6개의 전기자동차 모델을 구매할 수 있다. 현대기아자동차의 쏘울과 레이, 르노삼성자동차의 SM3, 한국GM의 쉐보레 스파크, BMW의 i3, 닛산의 리프다. 사용자들은 충전기 정보를 확인할 수 있는 충전 인프라 정보 시스템을 이용해 충전기의 상황을 실시간 확인할 수 있다.
전기자동차 이외에도 블랙박스와 예약 시동, 도어 잠금 해제 장치 등 자동차 스마트키의 기능을 스마트폰으로 옮긴 제품과 무인 자동차도 관람할 수 있었다.

한국 엡손은 국내에서 유일하게 시판 중인 스마트 글래스 ‘모베리오 BT-200′을 선보였다. 세계 최초로 두 눈으로 보는 양안식 시스루(See-through) 방식을 채택한 스마트 글래스 모베리오 BT-200에는 초소형 빔프로젝터가 2대 내장 되어 사이드 바이 사이드(Side-by-Side) 방식의 3D 영상을 즐길 수 있으며, 영상을 보면서 바깥의 풍경도 볼 수 있다.

좌) 디지털 액세서리 브랜드 픽스에서 고급형 이어폰 XE-701을 선보였다. 세련되고 견고한 디자인으로 중저가형 제품으로는 드물게 내구성이 강한 극소형 밸런스드 아마추어(BA) 드라이버 유닛을 탑재하였다.
우) 스마디는 전시장에서 선보인 ‘LINC’는 스마트폰에 걸려오는 전화나 문자메시지, 이메일, SNS 메시지 등의 다양한 알림을 실시간으로 알려주는 스마트 밴드로, 스마트폰이 가방이나 주머니에 들어있어도 손목에 착용한 LINC를 통해 다양한 알림을 바로 확인할 수 있으며, 그 외에 여러 가지 편의기능을 제공한다.

AJ네트웍스는 A4용지로 원하는 형상을 출력하는 풀 컬러 3D 프린터인 ‘Mcor IRIS’ 모델을 선보였다. 일반 3D 프린터 대비 재료 값과 운용비용이 저렴하고, 출력물 단면에서 1만 가지 이상의 색상표현이 가능하다. 인쇄한 제품은 코팅함으로써 목재 수준의 강도를 지니게 된다. 컴퓨터, 노트북, 복사기 등의 정보기기, RF & MW 관련 제품 등 종합 렌탈 전문 기업인 AJ네트웍스는 국내 3D 프린터의 고객 접근성과 시장 확산을 위해 유통 판매와 렌탈 판매를 병행한다.
전시장에는 3D 프린터 관이 따로 마련되어 부스가 상대적으로 많이 있었다.
좌) 오브젝트빌드(OBJECTBUILD)의 네트워크 탑재로 단독 프린팅 가능한 3D 프린터인 ‘Willybot MSLV’를 선보였다. 컴퓨터와 연결 없이도 네트워크로 연결된 기기로 프린팅할 수 있으며 실시간으로 프린팅되는 장면을 볼 수도 있고, 원격네트워크 통신으로 프린팅할 수 있다. 구매 고객에게는 전문 교육프로그램도 제공한다.
우) 로복스(Robox)는 다양한 그림을 3D 입체물로 만들어주는 ‘키즈아트 3D’를 선보였다. 아이들을 대상으로 한 3D 프린터로 부스에는 많은 아이들이 찾아 관람과 체험을 하였다.

좌) 복합기, 프린터, 팩시밀리 등 임대 및 판매하는 신도리코에서는 설치와 사용이 편안한 콤팩트 사이즈의 3D 프린터 큐브(Cube)를 선보였다.
우) 3D 프린터 전문학원인 쓰리디아이템즈는 교육커리큘럼 및 전문가용 대형 3D 프린터 ‘매직 몬스터’를 선보였다. 풀 알루미늄 프레임으로 저진동, 저소음으로 설계되었다.

좌) 영상정보, 디지털시스템 개발을 하는 엔디에스 솔루션은 웹캠, 프린터, 카드리더기, 바코드스캐너 등 다양한 애플리케이션에 장착 가능하여 자동주문, 쿠폰인쇄 등 콘텐츠에 활용에 가능한 ‘SMART KIOSK’를 선보였다.
우) 현대아이티는 디스플레이 전문 기업으로 대화면으로 함께 보고, 쓰고, 지우며 모든 기능을 터치하는 ’스마트 보드’를 선보였다. 디자인 리뷰, 교육장, 설계도 검토, 강연, 업무 미팅 등 다양한 곳에서 사용할 수 있다.
이번 스마트M테크쇼는 스마트한 기술을 선보이는 자리인 만큼 전시회에 대한 정보도 애플리케이션으로 바로 확인할 수 있었다. 전시회에 전반적인 내용과 부스 위치, 사전 등록까지 스마트하게 사용이 가능했다. 스마트폰과 관련 액세서리, 3D 프린터들이 전시회 부스를 많이 메웠다. 요즘 추세인 아이템들이라 그런지 개인적으론 다양성이 다소 부족했던 전시회였던 것 같다. 2015년 스마트M테크쇼는 넓은 분야의 전시회인 만큼 조금 더 다양한 볼거리와 체험이 풍부하게 개최되길 바란다.
[25호]DIY 프로젝트 공모전- 차선 인식을 통한 차량의 능동적 안전시스템 개발


글 | 명지대학교 김병조, 김윤정, 오현환, 이준환, 하늘
심사평
NTREX Lab 본 내용은 학부생의 졸업작품 발표로는 아주 우수한 내용이지만, 이 내용이 DIY 공모전에 어울리는지 알 수 없습니다. 만약 어울린다면, 좋은 점수를 줄 수 있지만..
싱크웍스 커다란 라인트레이서 같지만 작은 것을 움직이는 것과 큰 것을 움직이는 것에는 또 다른 기술적 고려가 필요하다. 본 프로젝트 기술은 무인 자동차를 개발하는 곳에서 필수적인 기술로 알고 있다. 기계공학과 학생들임에도 불구하고 전자, 전기적인 요소 기술이 필요한 복합 기술을 이용하여 작품을 만들었다는 것에 대해서 높게 평가한다.
펌테크 학생의 실력이라고 생각하기 어려울 정도의 작품 구성, 완성도가 돋보입니다. 영상처리, 하우징 설계, 소프트웨어 구현 사항이 아주 훌륭합니다.
JK전자 현재에도 일부 네비게이션 등에 추가 어플리케이션으로 구현이 되고 있는 기능으로 영상 처리를 통하여 중앙선 혹은 차선 침범에 대해서 Alarm을 해주는 시스템이 있습니다. 하지만 이번 과제에서는 추가적으로 결과에 대해서 적극적으로 차량을 컨트롤 하는 부분까지 진행을 한 것은 조금 더 진보한 시스템인 것 같습니다.
작품개요
| 제작기간 | 2012.04.01. ~ 2012.11.31. | |
| 제작비용 | 50만원 (부족비용은 장비대여 및 폐차 부품 재가공) | |
| 응모자 참여활동 요약 | 김병조 | 차량 구동시스템 구성 및 프로그래밍 |
| 김윤정 | 차량 기구 및 응력 해석 | |
| 오현환 | 하드웨어 제작, 영상처리 알고리즘 설계 (교점, 방정식 유도) | |
| 이준환 | 영상처리 프로그래밍 및 테스트 | |
| 하늘 | 차량 모델링 및 테스트 | |
전기 자동차에 대한 관심이 증가하면서, 기술 개발의 패러다임이 기계시스템에서 점차 전기시스템으로 바뀌고 있다. 이와 같은 흐름에서 엔진과 같은 차량의 구동퍼텐셜을 제공하는 시스템은 전기시스템으로 점차 대체될 가능성이 매우 높지만, 보행 편의수단으로써 뛰어난 편의성을 제공하는 차량에 대한 수요는 여전히 높을 것으로 예상된다.
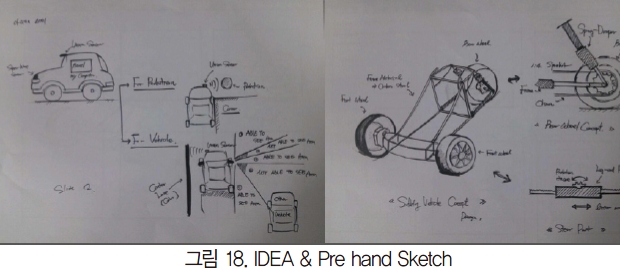
차량에 대한 수요의 증가는 앞으로 차량의 기술개발은 인간에게 기술적 혜택을 제공하는 것과 더불어 안전에 대한 시스템 연구도 동시에 강구되어야 한다. 이에 따라 본 작품은 차량의 안전시스템 개발의 일환으로, 컴퓨터 비젼 기술을 이용한 차량의 안전시스템 개발에 대한 제안서이며, 그 구체적인 방법은 도로상황에서 카메라를 통해 차선을 실시간으로 인식하여 차량이 위험 상황에서 차선을 이탈하는 경우, 시스템이 능동적으로 차량 구동에 개입하여 제어하는 능동안전시스템이 탑재된 지능형 차량 개발에 있다. 시스템 개발에 있어 고려해야할 설계 요소는 크게 두 가지 사안으로 차량의 능동적 조향제어를 위한 구동시스템을 구축하는 것과 실시간으로 수집되는 영상에서 차선을 안정적으로 인식하는 기술을 확보하는 것이었다.
작품설명
3.1주요 동작 및 특징
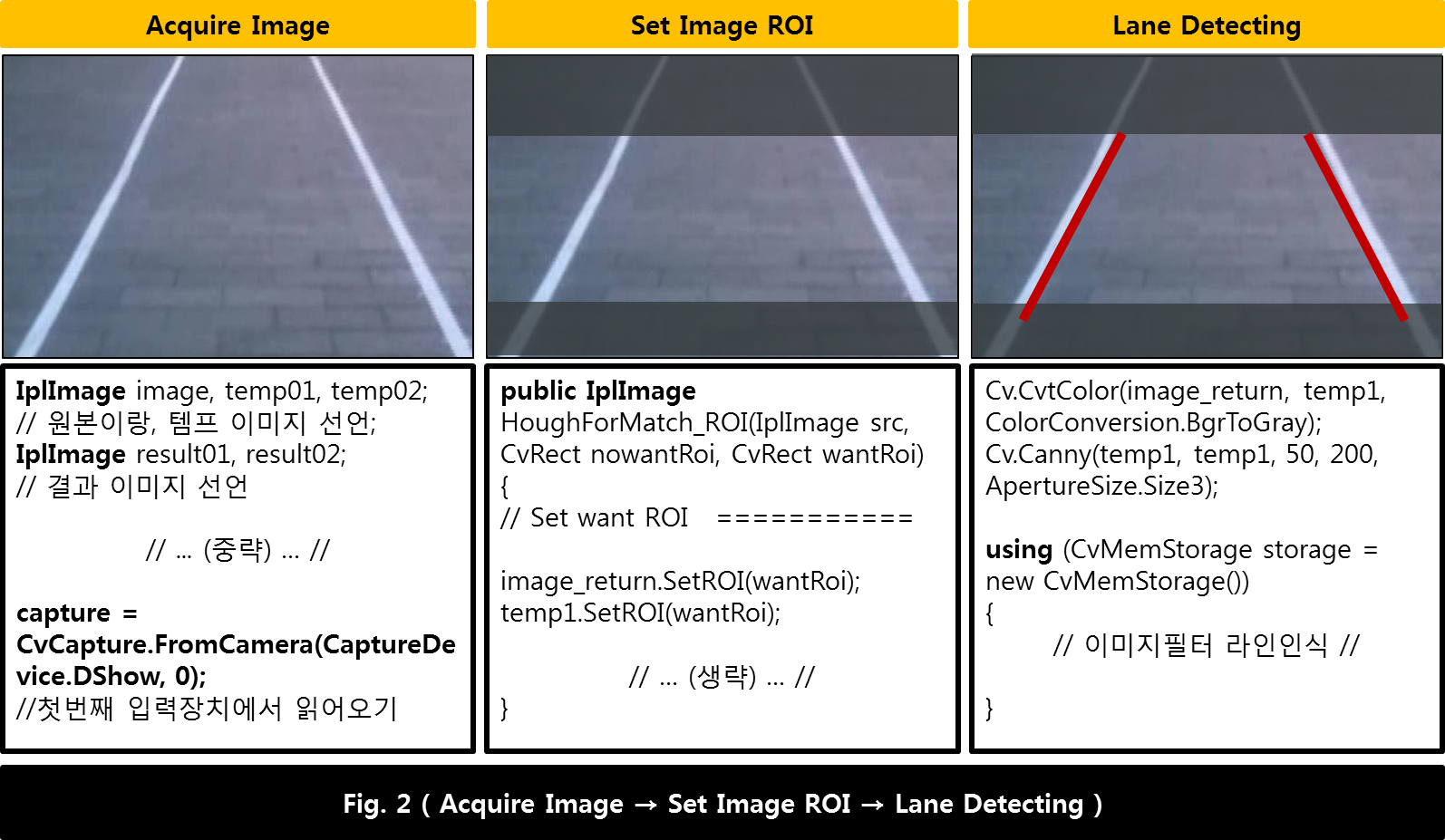
3.1.1 Acquire Image → Set Image ROI → Lane Detecting
3.1.2 Parameter → Line Equation (Two-Line : Match Point)
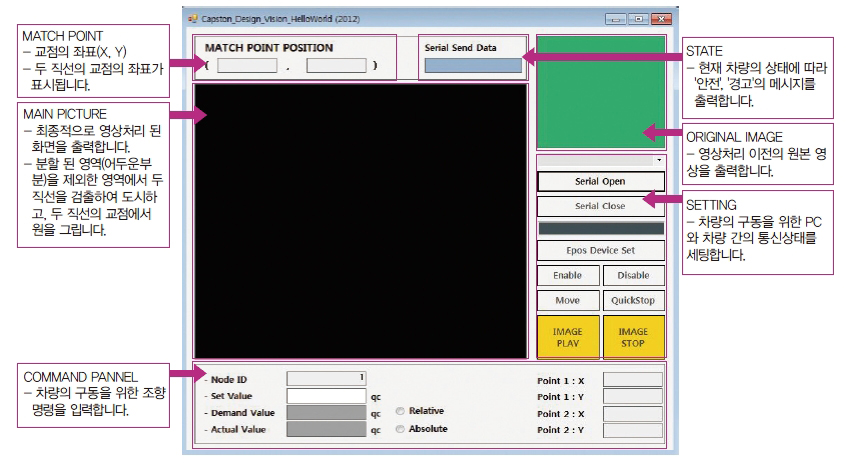
주요 동작을 살펴보면, 시스템은 1차적으로 캠을 통해 수집되는 영상정보를 이미지의 형태로 캡쳐하여 원본 이미지 정보를 얻어낸다. 이후 이미지는 바로 영상처리에 관여되기 이전에 영상처리에 간섭할 수 있는 불필요한 정보를 최소화 하기 위해 “Set Image ROI”라는 내장함수를 활용해 이미지를 우리가 관심이 있는 영역인 “HOT SPOT” 영역을 제외한 나머지 이미지를 삭제한다. 이후 이 당시에는 허프라인 함수를 통해 엣지를 검출하여 기본적인 라인을 검출하여 결과 이미지에 라인을 그리도록 하였다.
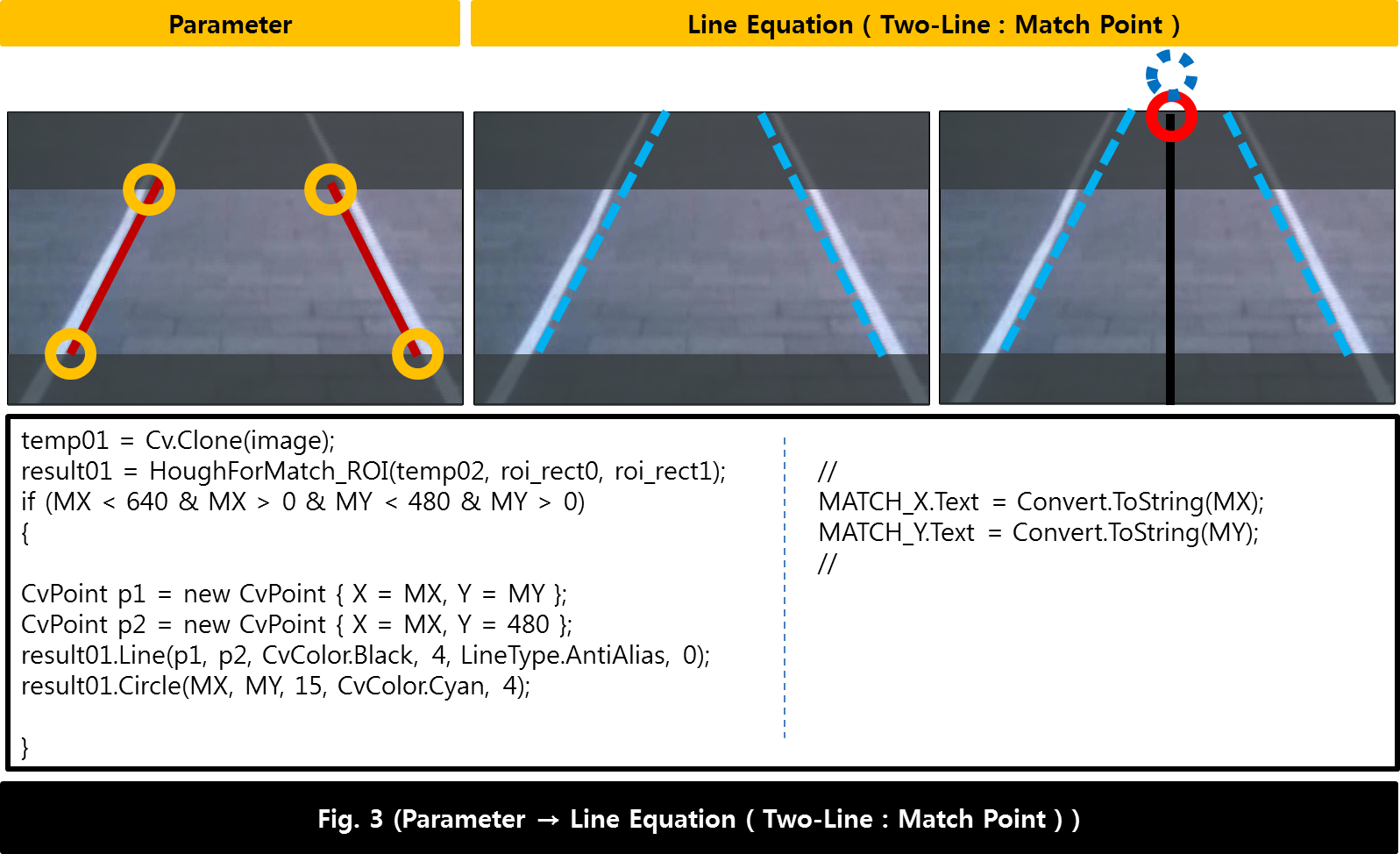
앞서 이미지 상에 라인을 그릴 수 있다는 것은 이미지 필터를 통해 직선을 그리기 위한 기본적인 좌표들이 계산되었음을 어렵지 않게 예측 할 수 있다. 나아가 이는 이러한 좌표정보를 통해서 간단한 방정식을 유도할 수 있음을 의미하며, 식 정리를 통해 기본적인 좌표들을 반환받고 이를통해 두 차선의 방정식을 유도한 후 교점을 계산하여 그릴 수 있다는 것을 의미한다. 실제로는 대부분의 교점이 이미지 화면 외부로 발생되기 때문에 화면상에 그릴 수 없으나, 본 조향제어에서는 교점의 x좌표를 가지고 판단하고 직관성을 높이기 위해서 그림3에서 빨간색으로 그린 원처럼 y좌표의 경우는 limit을 두어 이미지 내에서 그릴 수 있도록 보정을 해주었다.
3.1.3 Judgement State → Control Vehicle
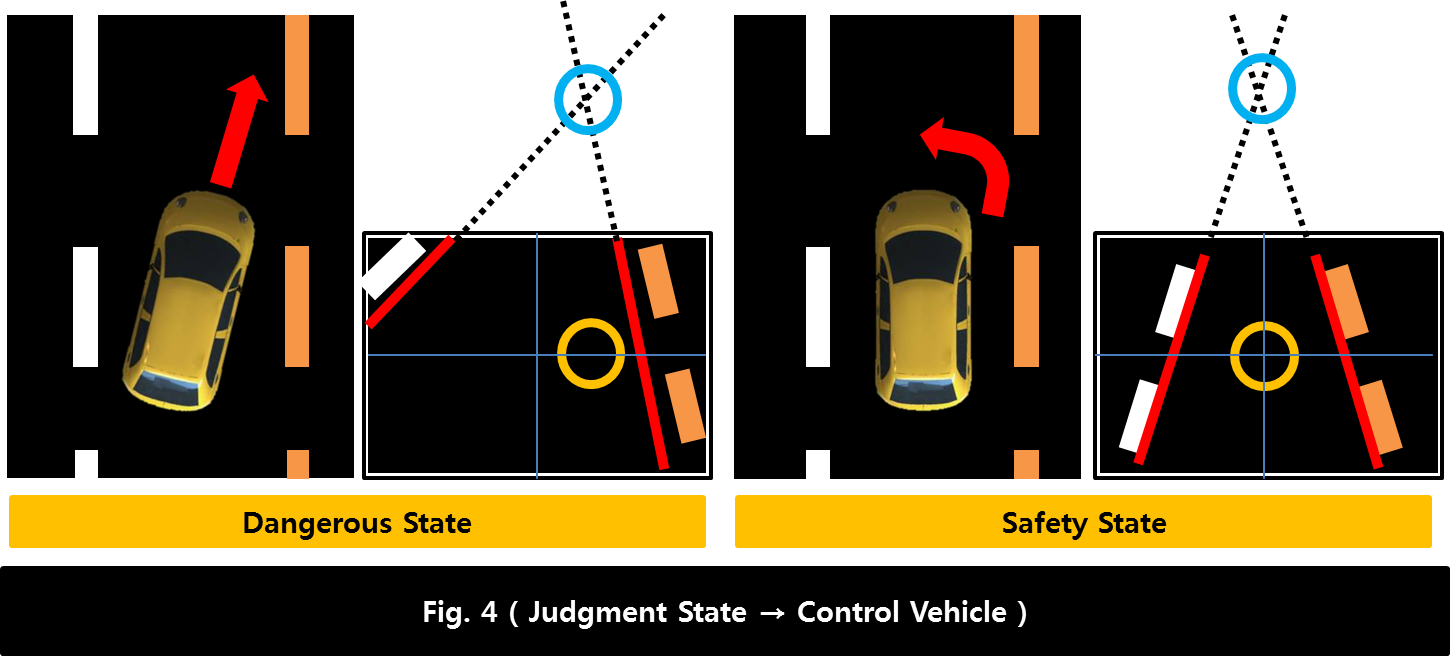
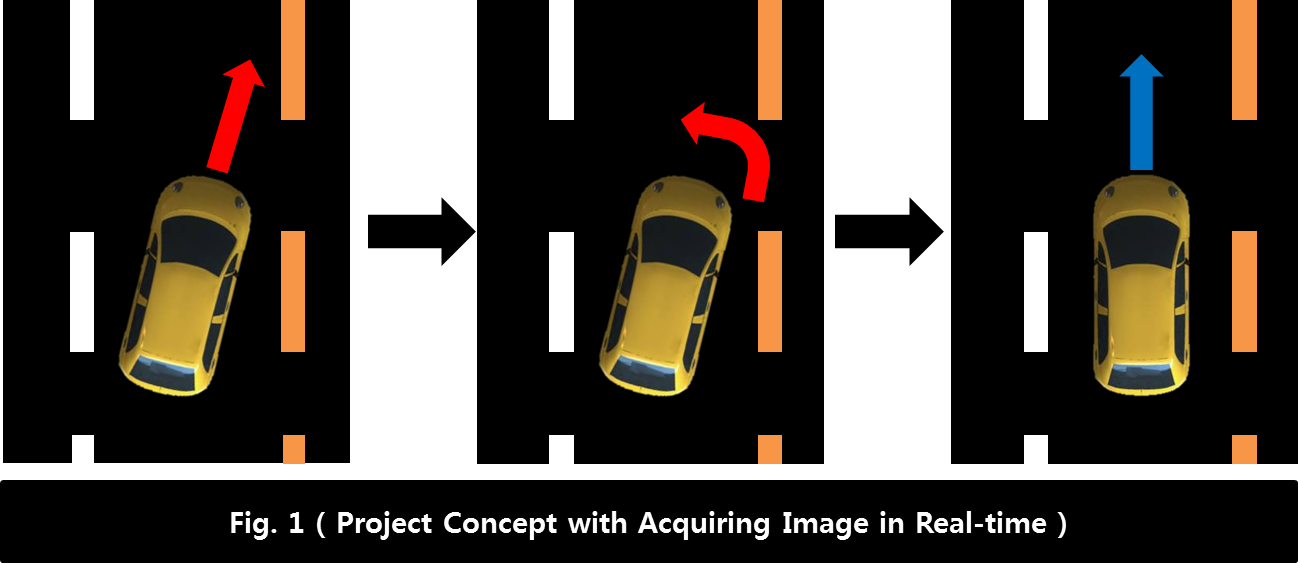
영상처리를 통해 검출된 차선으로부터 교점을 구한 것은 차량의 위험상태 판단을 위한 일종의 물리적인 의미를 가지기 때문인 것으로 판단했기 때문이다. 이는 도로정보를 실시간으로 수집하는 카메라가 차량에 고정되어 있어 그림과 같은 상황이 발생되므로 카메라가 고정될 경우 두 차선 사이에서 차량의 상대적인 위치를 알 수 있을 것이라 예상하여 적용했다.
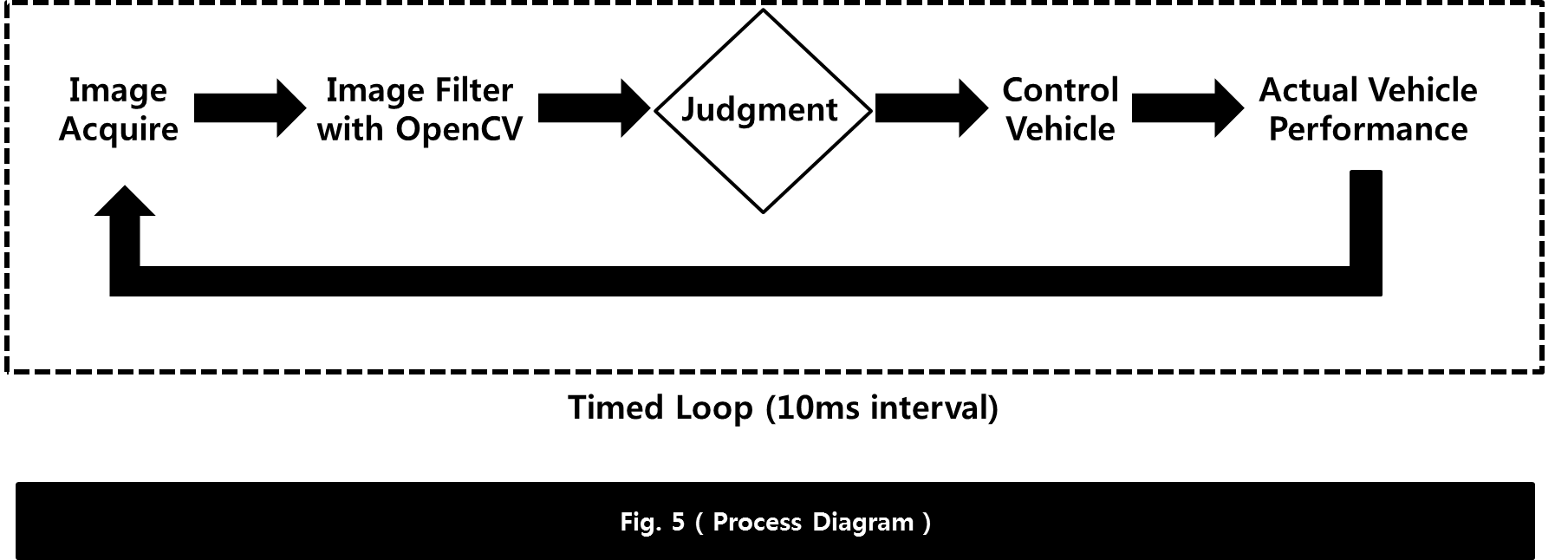
3.1.4 Process Diagram
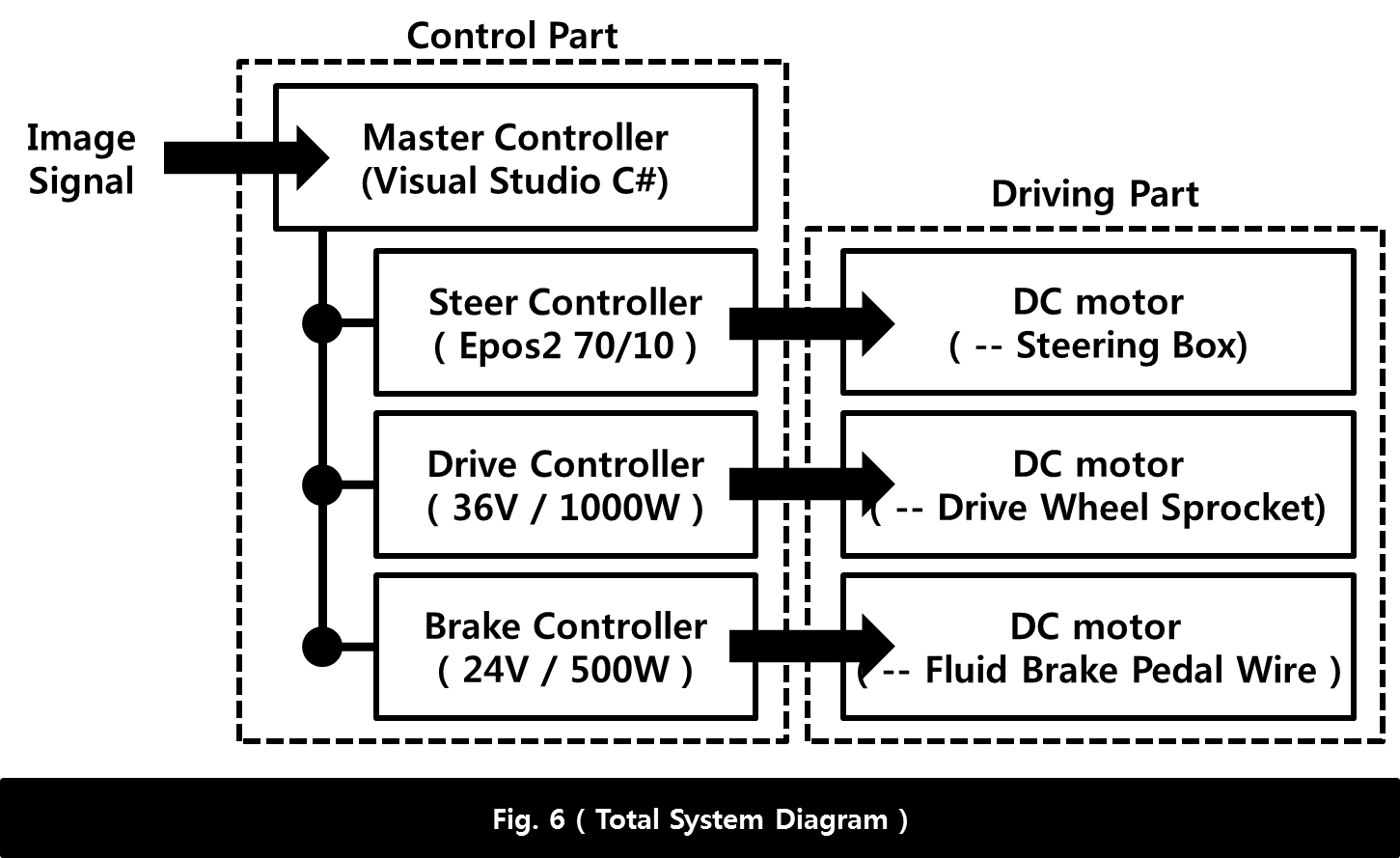
3.2 전체 시스템 구성
| 구분 | 설명 | 노트 |
| 차량 구동시스템 제어 | 차량의 기본적인 운동을 위한 구동, 조향,제동부를 전기, 전자적으로 자동제어를 하기위해 모터를 기본적인 액츄에이터로 사용하여 기구적인 설계 및 제작. | |
| 영상카메라 실시간 영상수집 | WEB – CAM을 통해 수집된 영상정보를 실시간으로 이미지를 캡쳐하여 이미지 필터 처리를 통해 목표달성을 위한 파라미터들을 실시간으로 계산하여 차량을 제어. |
Open-CV 함수 재프로그래밍하여 작성 |
3.2.1 Driving System

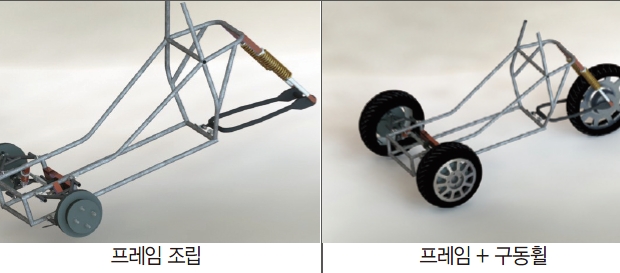
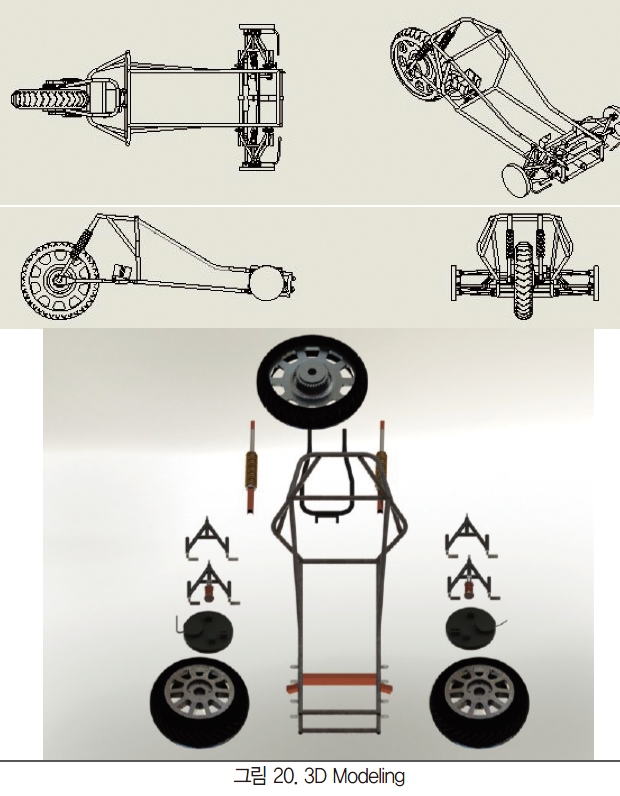
영상처리의 결과를 바탕으로 차량의 구동을 자동적으로 제어하는 것이 요구되었기 때문에 차량의 기본적인 운동을 위한 차량의 구동시스템은 모두 전기적으로 제어하기 용이한 모터를 액츄에이터로 선정하여 모든 차량의 설계가 진행되었다.
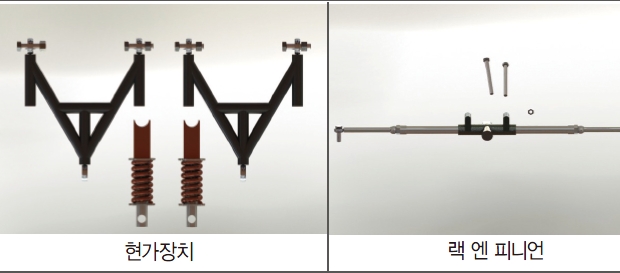
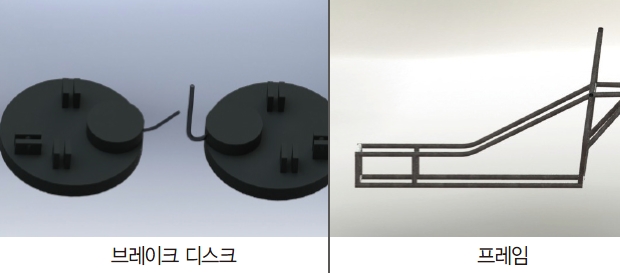
조향부의 경우는 맥슨 사의 24V급의 DC모터와 전용 컨트롤러를 장착하였으며, 모터의 샤프트와 랙앤 피니언이 기구적으로 연결되어 있어, 모터의 위치제어를 통해 차량의 조향을 제어할 수 있도록 설계 및 제작되었다. 구동부와 제동부의 경우 동일하게 DC모터 및 해당 컨트롤러를 장착하였고, 구동부의 경우는 감속기의 효과를 위해 기어비를 계산하여 적정한 잇수의 스프라킷을 결속하여 체인-스프라킷 형태로 구성이 되어있다. 제동부의 경우는 와어링을 통해 유압 실린더의 유압을 기계적으로 제어하게 구성하였다.
기본적으로 조향부의 경우는 상위제어기인 노트북과 컨트롤러의 USB통신을 통해 위치제어를 하고, 구동부의 경우 노트북과 시리얼통신으로 통신하고 있는 AVR보드에서 스로틀을 기계적으로 조작해 속도조절을 위한 0~5V의 아날로그 신호를 제어한다. 제동부, 역시 AVR 보드를 통해 제어되며 간단한 ON-OFF 제어를 통해 조작하도록 구성하였다.
3.2.2 Image Filtering System
이미지 필터링 코딩환경은 기본적으로 VC# 환경에서 작성이 되었으며, 기본적으로는 OpenCV에서 제공하는 dll 파일을 참조하였고, 이를 주제에 맞도록 프로그래밍하여 전체적인 시스템을 구성하였다. 영상 이미지는 기본적으로 노트북과 연결된 캠을 통하여 정보를 실시간으로 수집받는 형태이며, 이를 위해 루프로 구성되어 있는 프로그램을 실시간으로 실행하면서 전체적인 시스템은 동작한다.
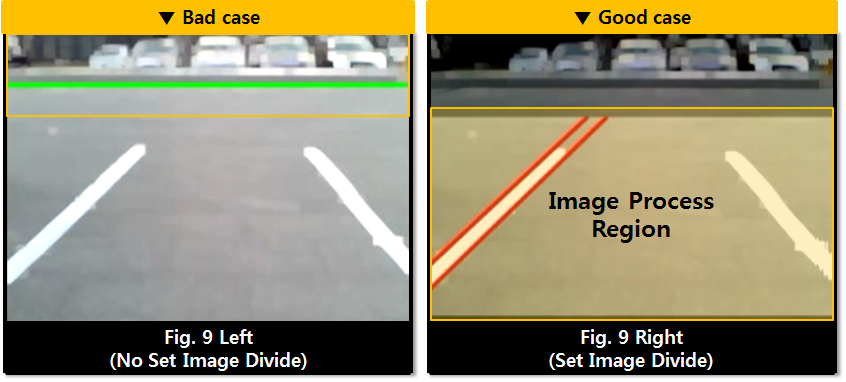
그림 9는 실제로 차선을 일직선으로 구성하여 모의실험을 진행한 그림으로 해당 그림은 관심영역을 설정하지 않은 경우와 적용한 경우를 비교 테스트를 한 화면이다. 관심영역을 설정하여 자르지 않으면 왼쪽 그림과 같은 불필요한 부분을 차선으로 인식하는 오류를 범하여 작동 오차가 발생하게 된다.

그림 10는 차선을 통해 간단한 방정식을 구성해서 교점을 인식해 도시하도록 한 화면이다. 두 차선이 검출될 경우의 연장선에 대한 교점은 차선 사이의 차량의 상대적인 위치를 나타낼 수 있는 물리적인 의미로 보고 있다.
3.3 개발 환경 (개발언어, Tool, 사용시스템)
| 구분 | 개발언어 | Tool | 사용시스템 | 노트 |
| 영상처리 프로그래밍 | C# Language | Visual Studio + with Open CV | Notebook(상위제어기) | 웹캠을 통해 실시간으로 영상처리하여구동부 제어를 위한 하위제어기 제어(USB + Serial Communication) |
| 차량 구동부 제어 | C Language | AVR Studio | AVR board(하위제어기) | Serial Communication을 통한 DC 컨트롤러 스로틀 명령제어 (기계식)5단계 속도변경 분해능 |
| 차량 조향부 제어 | C Language | Visual Studio | 상위제어기에 조향제어 명령 포함 | 모터 컨트롤러를 통해 조향모터 위치제어 모터와 랙-앤 피니언을 기구적으로 연결하여 차량의 조향 제어 |
| 차량 제동부 제어 | C Language | AVR Studio | AVR board + DAC(하위제어기) | 차량 구동부와 동일. (단순 ON-OFF 제어) |
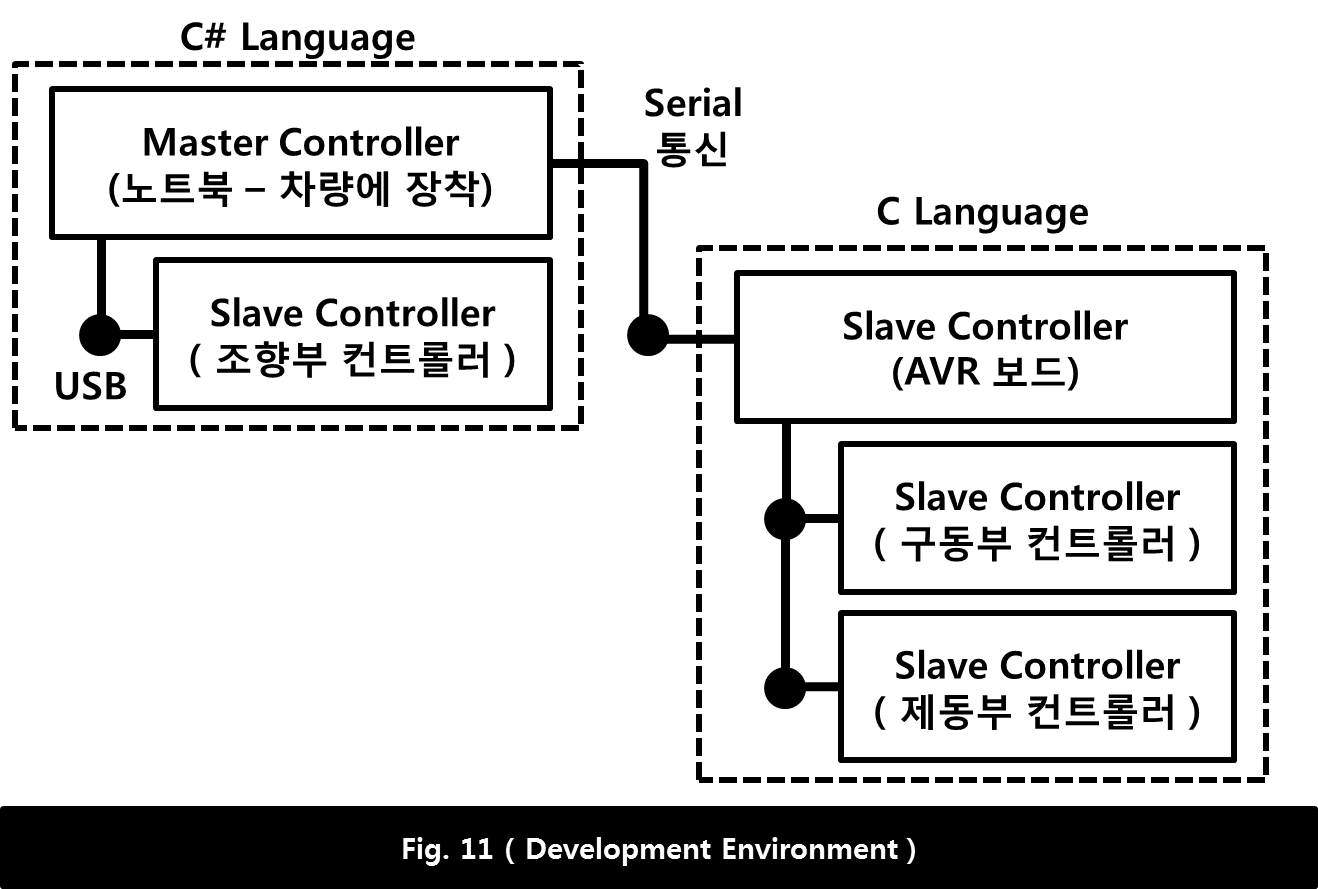
개발환경은 기본적으로 비쥬얼 스튜디오를 통해 프로그램은 작성되었다. AVR 보드 부분은 하위제어기의 개념으로 사용되고 있으며 기본적으로 C언어로 프로그램이 작성되어있다. 상위제어기는 노트북에서 실시간으로 실행되는 프로그래밍 언어이며, 기본적으로 C#언어로 구성되어있다.
3.4 실험내용
3.4.1. RC 차량 테스트
| 기간 | 내용 | 실험환경 |
| 2012년도 1학기
2012. 05. 30. ~ 2012. 06. 15 |
1. 직선 차선 시스템 점검 2. 곡선 차선 |
1. RC 모델차량 구성 : 조향 (서보모터), 구동 (DC모터), 프레임 (RC카) 2. RC 모델 전용 카메라 : DRC 3.0 (바램시스템 카메라) 3. RC 차량 제어 : - 아트메가 보드를 통한 차량제어 (AT mega 128) - 블루투스 모듈(FB755AX)을 통해 노트북으로부터 제어명령 수신 및 동작 4. 영상처리 (비쥬얼 C# 환경) : DRC Station을 통해 영상정보 수집 및 블루투스 명령을 통한 RC 차량 제어 |
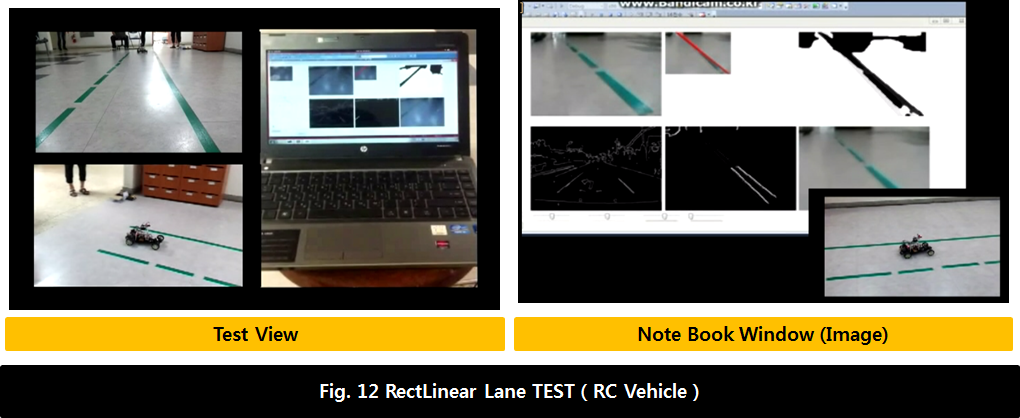

각각 직선 차선에서의 실험과 곡선 차선에서의 실험을 실시한 그림이며, RC차량을 통해 1차적으로 실험을 진행하였다. RC 차량을 통한 실험은 전체적인 시스템을 점검하기 위해 실시되었으며, 실제로 제작차량에 적용하여 실험을 실시한 시점에는 프로그래밍적으로 많은 변경이 있었다.
3.4.2. 제작 차량 테스트
| 기간 | 내용 |
| 2012. 04. 01. ~ 2012. 05. 30 |
공학설계 - 차량설계,구조해석, 제작차량 프레임제작 - RC모델 실험 차량 제작 |
| 2012. 05. 30. ~ 2012. 06. 25 |
시스템 구축 - 제작차량 완성, 차량 구동시스템 자동제어 - RC모델 차량 무단이탈 방지 기능 실험 테스트 |
| 2012. 07. 30. ~ 2012. 10. 31 |
모의도로 실험 - 통합 프로그램 작성, 영상 테스트 실험 (실내/외) - 제작 차량 모의도로 실험 |
| 2012. 10. 31. ~ 2012. 11. 31 |
실제도로 실험 - 알고리즘 보완 ( 영역분할 / 두 차선의 교점방정식) - 제작 차량 실제도로 실험 |


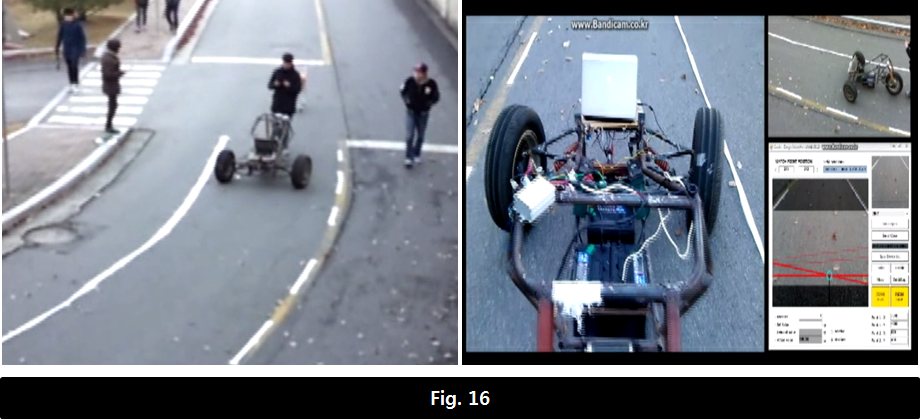

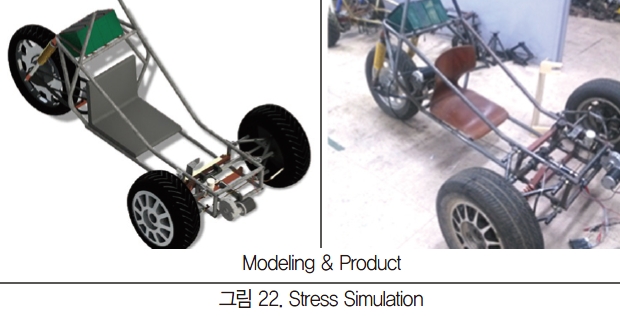
모의 실험 테스트 이후 실시된 제작 차량의 테스트는 모의적으로 조성된 공간에서 실시한 RC 차량 테스트에 비해 실제 도로 환경으로 실험이 옮겨지고 HW가 커지면서, 전체적인 퍼포먼스가 약해졌으나, 영역분할 등의 알고리즘을 강화하는 노력 등을 통해 시연 성공률을 높여 시스템의 가능성을 점검할 수 있었다.
4. 단계별 제작과정
| 기간 | 내용 | 실험환경 |
| 2012년도 2학기 2012. 10. 01. ~ 2012. 11. 31 |
1. 간이도로 모의 실험 2. 차량 작동 테스트 3. 종합실험 |
1. 제작차량 구성 : - 영상처리부 : 노트북 탑재, 노트북 내장 캠을 통한 이미지 캡쳐 - 구동시스템부 : 프레임 (탄소강파이프) 용접 가공, Maxon DC motor (24v), Controller Epos (70/10), DC motor (36V / 1000W), DC motor (24V), DC controller(36/24V), ATmega128, 기타 전기 부속품… 2. 실험장소 : 공학관 건물 뒤편 |




제출한 본 응모작은 차량의 능동 안전 시스템 개발에 대한 시스템 구축에 대한 제안이며, 그 내용은 차량을 능동적으로 제어하기 위한 구동시스템을 설계하고, 컴퓨터 비젼분야를 활용하여 차량이 차선을 이탈하는 문제 상황에서의 안전 시스템을 제안하였으며, 제안된 시스템을 실험을 통해 검증하는 단계까지 진행하였다. 앞으로 해당 연구가 상용화단계에 이르기까지 당면한 과제들이 산적해 있는 것이 사실이지만, 학부생의 자격으로 1년 가까운 시간 동안, 실과에 준하는 프로젝트를 진행하고 개연성 있는 결과를 낼 수 있어, 개인의 역량과 팀별 협동능력을 신장시키는 좋은 계기가 된 것 같아 함께 해준 분 모두에게 감사드린다.
5. 기타
5.1. 소스코드 구조
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Drawing;
using System.Text;
using System.Windows.Forms; // SERIAL COMMUNICATION
: PRE_UTTILIES
using System.IO.Ports; // SERIAL COMMUNICATION :
PRE_UTTILIES
using Microsoft.Win32; // SERIAL COMMUNICATION :
PRE_UTTILIES
using System.Runtime.Interop S er vices; // SER I A L
COMMUNICATION : PRE_UTTILIES
using CapstonDesignVision; // SERIAL COMMUNICATION
: PRE_UTTILIES
using EposCmd.Net; // EPOS :
using EposCmd.Net.DeviceCmdSet.Operation; // EPOS :
using OpenCvSharp; // WEB_CAM : Image
Processing
namespace CapstonDesignVision
{
public partial class Form1 : Form
{
#region SECTION 0 : INITIAL DEFINE
// 프로그램 동작 초기설정 세팅
#endregion
#region SECTION 1 : SERIAL COMMUNICATION
// 시리얼 통신 부 변수 및 함수 정의 (프로토 타입)
#endregion
#region SECTION 2 : EPOS CONTROLL
// 조향부 컨트롤러 조작 관련 변수 및 함수 정의 (프로토 타입)
#endregion
#region SECTION 3 : IMAGE
// 이미지 필터 변수 및 함수 정의 (기본 처리 필터, 영상분할, 허프직선 포함)
#endregion
#region SECTION 4 : ROOF
// 프로그램 동작 명령시 반복적으로 실행되는 타이머 루프
(이미지 수집 → 영상분할 → 영상처리 → 교점검출 → 판단 → 차량제어 → 이미지 삭제)
#endregion
}
}
5.2. 테이블 정리
| 구분 | 내용 | 노트 |
| 소스코드 | Form1 | 메인 프로그램 작성 – 통합 (시리얼통신, 조향부 컨트롤, 영상처리 코드 포함.) |
| Form1.Designer | 윈도우 리소스 | |
| globalKeyboardHook | 시리얼 통신 부 클래스 | |
| 참고문헌 | 1. h t t p:// t r a m p e r 2 . b l o g . me/100070878701 |
영상처리에대한 전반적인 개념 숙지 및 프로그래밍 실무 참고 |
| 도서 – LEARNING OPEN CV 제 대로 배우기 |
영상처리 이론 습득 | |
| http://blog.naver.com/PostView. n h n ? b l o g I d = m y c p p & l o g No=120103606802 |
관심영역 설정 (SetImageROI 참고) | |
| ht tp://blo g.n aver.c om/blu e s e alh?Re dire ct = L o g&lo g No=20044187187 |
무인 자율주행 차량에 대한 참고 | |
| h t t p :// c a f e . n a v e r . c o m / opencv/7897\ |
Open CV KOREA 카페 |
[25호]International LED Expo 2014


International LED Expo 2014
글 | 이용세 edgar@ntrex.co.kr
2014년 6월24일부터 27일까지 일산 킨텍스 전시장에서 세계 LED 엑스포가 열렸다. 올해로 12회를 맞이한 전시회로써 해마다 발전되는 조명기기의 산업현장을 느낄 수 있는 의미있는 자리이기도 하다.

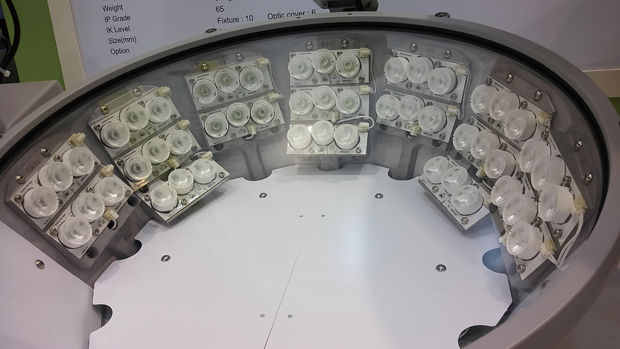

LED, OLED 조명과 장비, 함께 사용되는 부품 외 소재 관련 업체가 13개국 240여개사 550부스가 넘는 규모로 진행되었다. 지난 전시회를 돌아보면 LED 소자의 발전, 소자의 발열과 소모 전력을 줄이고 사용 효율을 높이는 부분이었다면 지금은 시설 장비. 솔루션으로 발전되는 느낌이었다. 운용 솔루션은 설치, 설비 장비와 전원 모듈, 그리고 다양한 건물과 산업단지, 생활공간 전부를 컨트롤하는 통합 관리 시스템이다.
금호전기는 205lm/W급 직관램프를 선보이고, 일진 LED는 200lm/W가 넘는 7030 LED패키지를 공개했다.
씨지라이팅은 할로겐 조명을 대체할 조명 ’레온’을 출시. 기존 할로겐의 85%수준까지 끌어올렸으며 기존 할로겐의 전력 소모량의 10분의 1 수준으로 발열이 심하지 않고 반사각이 넓어 다크존이 없다는 것이 특징이며 할로겐에 비하여 10배가 넘는 수명이 보장된다.


기존 할로겐이 사용되던 부분에 앞으로 색 재연성이 높아진 만큼 많은 부분을 대체할 조명으로 주목받고 있다.

끝으로 SMD 타입의 WAGO사의 표면실장 가능형 커넥터를 소개하고자 한다. 작은 사이즈로 공간을 적게 차지하며 소형, 유선연결 LED 스포트라이트에서부터 산업 배선까지 드라이버와 모듈간의 완벽한 연결을 제공한다. 전 세계 여러 응용 분야에 다양한 적용이 가능하도록 많은 전선들을 수용 가능하도록 설계되었다. 자세한 내용은 미디어사이트(www.ntrexgo.com)와 디바이스마트에 게재될 예정이다.
[25호]BD-MACH3-INT (MACH3 인터페이스 보드) 출시
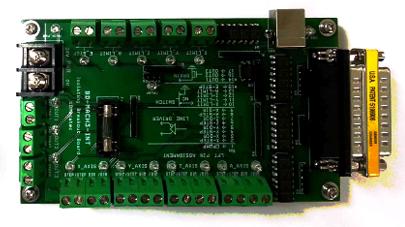
BD-MACH3-INT (MACH3 인터페이스 보드) 출시
케이디메카텍에서 Mach3가 구동되는 PC와 NC머신의 위치 제어모터(스텝모터 또는 서보모터)드라이버를 연결하는 인터페이스 보드를 출시했다.
15개의 포토커플러를 이용해 패러럴 포트의 입출력을 모두 절연시킴으로써 노이즈의 유입을 차단하여 정확한 신호 전달 성능을 제공한다. 총 4축(X, Y, Z, A)의 제어신호를 스텝(STEP)과 구동방향(DIR)으로 나눠 출력하며, 노이즈에 강인한 5V Line Driver 형태의 출력을 지원한다.
또한 내장된 Charge Pump 회로를 이용해 Mach3가 구동되는 동안에만 모든 출력이 활성화되는 기능을 제공하여 오작동을 방지하였으며, 3개의 Open Drain 출력을 이용하여 릴레이뿐만 아니라 작은 출력의 DC모터(1A Max)도 구동할 수 있도록 설계됐다.
그리고 프레임의 이동을 제한하기 위한 리미트 스위치 입력 및 비상정지 스위치를 포함하여 총 5개의 입력단자를 제공한다. Mach3의 설정부터 플라즈마가공 예제에 이르기까지 매뉴얼을 제공하여 초보자도 쉽게 CNC가공에 접근할 수 있도록 했다.
BD-MACH3-INT (MACH3 인터페이스 보드)의 자세한 사항은 디바이스마트를 통하여 확인할 수 있다.
TEL. 043-213-1531
E-MAIL. min_k_d@cbnu.ac.kr
[25호]수퍼라인 3종 출시!

수퍼라인 3종 출시!
러시아 Innovation Technologies사의 한국총판인 나노프로텍코리아에서 새롭게 출시한 수퍼라인 제품 3종을 선보였다. 수퍼라인은 가정에서도 사용할 수 있는 제품으로 삐걱거림, 누전, 부식, 물기로부터 안전하게 보호하며, 방수가 뛰어나 전기 및 기계장치에 적용 후 장기적으로 사용할 수 있는 제품이다.
 수퍼라인 전기절연 S-EL | 100% 수분을 차단하는 가장 강력한 방수제품으로, 산업용 뿐만 아니라 가정용 전기제품을 물 속에서도 정상작동이 가능하게끔 뛰어난 코팅력을 가진 제품이다. 강력한 나노보호층은 윤활, 우수한 습기방지, 부식방지 등의 기능이 있다.
수퍼라인 전기절연 S-EL | 100% 수분을 차단하는 가장 강력한 방수제품으로, 산업용 뿐만 아니라 가정용 전기제품을 물 속에서도 정상작동이 가능하게끔 뛰어난 코팅력을 가진 제품이다. 강력한 나노보호층은 윤활, 우수한 습기방지, 부식방지 등의 기능이 있다.
 수퍼라인 녹방지 S-AN | 실험 및 테스트를 통한 기계장치나 금속제품의 녹 침투방지, 윤활 및 강력한 부식방지 속성으로 제품을 완벽하게 보호한다. 자동차, 자전거 체인, 볼트와 너트 등 금속제품의 수명을 연장할 수 있는 제품이다.
수퍼라인 녹방지 S-AN | 실험 및 테스트를 통한 기계장치나 금속제품의 녹 침투방지, 윤활 및 강력한 부식방지 속성으로 제품을 완벽하게 보호한다. 자동차, 자전거 체인, 볼트와 너트 등 금속제품의 수명을 연장할 수 있는 제품이다.
 수퍼라인 윤활 S-LU | 눈에 보이지 않는 견고하고 얇은 나노코팅은 일반적인 침투 및 윤활과는 달리, 아주 긴 시간 보호해주며, 움직임이 많은 기계장치에 사용하면 1년 이상 마모를 방지할 수 있다. 냉동이나 장기간 방치로 인해 심각한 부식이 된 제품을 강력한 모세관 효과로 작은틈까지 윤활층을 형성하여 효과적으로 마모를 방지한다.
수퍼라인 윤활 S-LU | 눈에 보이지 않는 견고하고 얇은 나노코팅은 일반적인 침투 및 윤활과는 달리, 아주 긴 시간 보호해주며, 움직임이 많은 기계장치에 사용하면 1년 이상 마모를 방지할 수 있다. 냉동이나 장기간 방치로 인해 심각한 부식이 된 제품을 강력한 모세관 효과로 작은틈까지 윤활층을 형성하여 효과적으로 마모를 방지한다.
제품 주의사항
직접적인 태양 빛을 피해 보관을 하고, 20~35°С의 통풍이 잘 되는 장소에서 제품을 사용하는 것이 좋다. 또한 불길이 있는 곳이나 전력이 공급되고 있는 제품에는 사용을 하면 안된다. 수퍼라인의 구매 및 스펙사항은 디바이스마트를 통해서 확인할 수 있다.
TEL. 070-7119-1607
www.nanoprotech.kr