MW-MDC24D200D Datasheet

MoonWalker Series
MW-MDC24D200D Datasheet
| Power Stage | |
| Motor Type |
DC Motor |
| Operating Voltage |
8~30VDC |
| Number of Channels | ?2 |
| Direction |
Forward/Reverse |
| Max Amps per Channel |
10A |
| Continuous Amps per Channel |
<20A |
| Encoder Output Voltage |
+5VDC (I<80mA) |
| D-sub15 Output Voltage |
+5VDC (I<60mA) |
| Command & Feedback | |
| R/C Inputs |
1.0ms – 1.5ms center – 2ms. Adjustable |
| Serial Interface |
RS232, CAN |
| USB Interface |
12-Mbit/s, type mini-B connector |
| Analog Interface |
0V – 2.5V center – 5V. Adjustable |
| I/O | |
| Optical Encoder Inputs |
2 incremental encoders |
| Digital Outputs |
4 outputs (max 50V/1A) |
| Digital Inputs | ?7 inputs |
| Analog Inputs | ?2 inputs |
| Pulse Inputs | ?4 inputs |
| Operating Modes | |
| Open Loop Speed |
Forward & Reverse Speed Control. Separate or Mixed |
| Closed Loop Speed |
Using Encoder or Tachometer feedback & PID |
| Position Mode |
Using Potentiometer, PWM sensor, or encoder & PID |
| Mini-C Scripting | |
| Max Program Size |
~1500 lines of C-language code, 256 user variables |
| Physical | |
| Operating Temperature |
-40 to +80oC heat sink temperature |
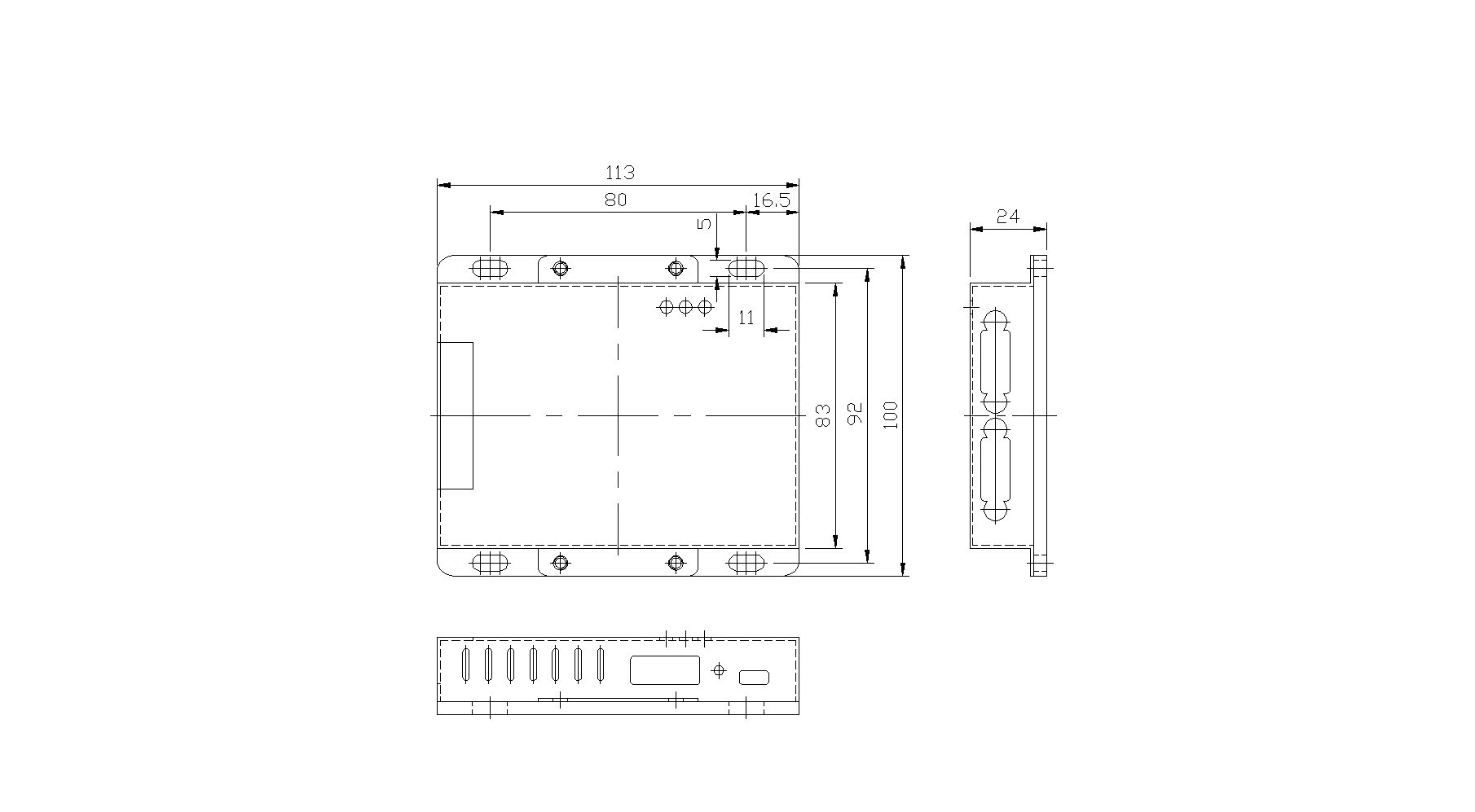
| Controller Size |
W:L:H = 113:100:24(mm) |
| Weight |
260g |
1.사용 및 적용 가능한 분야
- Industrial Automation
- Tracking, Pan & Tilt systems
- Terrestrial and Underwater Robotic Vehicles
- Automatic Guided Vehicles
- Police and Military Robots
- Flight simulators
- Telepresence Systems
- Animatronics
2. 기능 및 특장점
- Unipolar/Bipolar PWM 스위칭 방법 설정 및 18kHz에서 40kHz까지 PWM 주파수 설정 가능
- CAN, USB(Virtual Serial Port), RS-232 연결 지원 (CAN 통신 속도: 10K ~ 1M bps, RS-232/USB 통신 속도: 9600 ~ 921600bps)
- CAN, RS-422, RS-485에서 멀티드롭 연결을 위한 Device ID(1~255) 설정 가능
- 시리얼 통신(CAN, USB, RS-232) 연결 중단 시 모터 정지를 위한 Watchdog timer 기능 지원
- 시리얼 통신과 Analog Input, Pulse Input 명령어 동시 사용 가능
- Script 작성과 컴파일, 제어기로 다운로드 및 실행, PC에서 시뮬레이션 실행
- Anti-windup이 적용된 PID 위치제어기
- 위치 제어 시 가속도와 감속도가 고려된 사다리꼴 형태의 속도 프로파일 생성
- Anti-windup이 적용된 PI 속도제어기
- Anti-windup이 적용된 PI 전류제어기
- Incremental Encoder 피드백으로 정밀한 위치제어 및 속도제어
- Analog/Pulse input에 연결된 속도센서(Tachometer) 피드백으로 폐회로(Closed loop) 속도제어
- Analog/Pulse input에 연결된 위치센서(Potentiometer) 피드백으로 폐회로 위치제어
- PWM ratio의 직접 출력으로 개회로(Open loop) 속도 설정
- 사다리꼴 프로파일을 적용한 모터의 속도제어 및 PWM ratio 출력 설정 (프로파일의 가속도와 감속도를 각각 지정)
- 베터리 전압 측정으로 제어기의 과전압, 저전압 보호기능
- 모터의 전류 측정으로 모터의 과전류 보호기능
- FET 방열판의 온도 측정으로 제어기 과열 보호기능
- 모터 특성 설정에 따른 출력 제한 (정격 전압 제한, 최고 전류 제한, 최고 속도 제한)
- Min/Max 위치 범위 설정과 소프트웨어 리미트 기능
- 홈 포지션 설정
- 2축 차동바퀴형 이동로봇에 특화된 명령어 셋 제공 (좌우 모터의 속도제어 명령과 엔코더 피드백을 통신 명령 하나로 처리)
- 2축 차동바퀴형 이동로봇에 적용하기 위한 Analog Input, Pulse Input 믹싱 기능
- Joystick이나 RC signal(Analog/Pulse input) 사용시 Min/Max safety 기능과 Center safety 기능
- Pulse Input과 Analog Input에 대한 캘리브레이션과 Linearity 설정
- Min, Max, Center, Deadband 설정
- 6가지의 linearity 설정
- 최대 12개 Digital input 채널과 각종 기능 지원 (Emergency Stop, Quick Stop, Stop, Forward Limit Switch, Reverse Limit Switch, Invert Motor Direction, Load Home Counter)
- 최대 12개 Digital output 채널과 각종 기능 지원 (Brake release, Back-up warning indicator, Shunt load activation, Fan activation(Warning buzzer))
- 최대 6개 Analog input 채널과 각종 기능 지원 (Motor Command(PWM ratio, Current, Velocity, Position), Motor Feedback(Position, Velocity))
- 최대 6개 Pulse input(Pulse Length, Duty Cycle or Frequency input) 채널과 각종 기능 지원 (Analog input 채널과 동일)
- 3개의 LED를 사용한 Fault 표시, 동작상태 표시, 통신상태 표시
- 설정사항 EEPROM 저장 및 읽기
- Factory Default 설정 불러오기
- 제어기 소프트웨어 리셋
3 전원 및 모터 연결
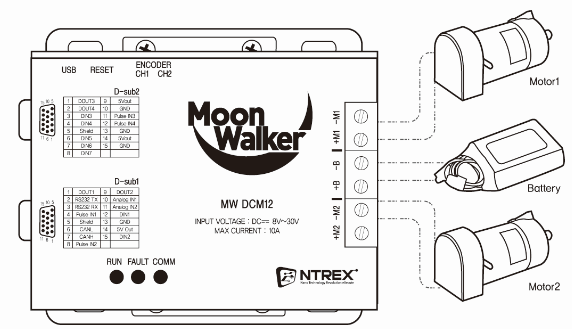
그림 1 전원 및 모터 연결
※주의※ 제어기는 높은 전력을 사용하는 전자 제품(장치)입니다. 전원의 극성을 잘못 연결하거나 잘못된 주변 회로 설계로 인해 제어기 및 주변 회로에 심각한 손상이나 화재가 발생할 수 있습니다. 특히 배선 오류로 인한 문제는 매우 심각한 결과를 초래할 수 있으며 제품 보증이 적용되지 않습니다.
※주의※ 모터를 연결할 때는 사용자가 고려하고 있는 방향성에 맞게 연결해야 합니다. 만약 모터의 극성이 반대로 연결되면 모터가 역방향으로 회전하게 되며 이런 상황에서 Closed loop 위치, 속도 제어가 이루어지는 경우에 모터가 폭주할 수 있습니다.
4. 안전 및 노이즈 감소를 위한 작업
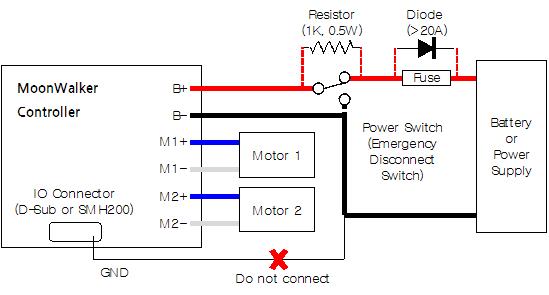
그림 2 제어기 및 전원 보호 회로 구성
전원을 보호하기 위해서는 아래와 같은 작업을 진행해 주시길 바랍니다.
- I/O 커넥터 그라운드 처리 (전원 그라운드와 연결하면 안됨)
- 퓨즈와 다이오드 삽입
- 전원 스위치 및 비상 정비 버튼의 사용
전기 노이즈를 줄이기 위해서는 아래와 같은 작업을 진행해 주시길 바랍니다.
- 전선은 가능한 짧게
- 전선을 페라이트 코어(Ferrite cores)에 감기
- 모터 단자에 스너버(Snubber) RC 회로 추가
- 제어기와 전선, 배터리를 외부와 접촉이 없는 금속 프레임에 설치
※ 본 데이터시트는 제어기 연결에 대한 요약된 정보만 담고 있습니다. 따라서 사용자는 사용자 설명서에 “전원 및 모터 연결” 내용을 확인하시기 바랍니다. 사용자 설명서에는 전원 및 모터 배선 연결과 안전 지침 정보에 대한 내용이 자세히 설명되어 있습니다.
5 커넥터 연결
5.1 엔코더 커넥터 연결
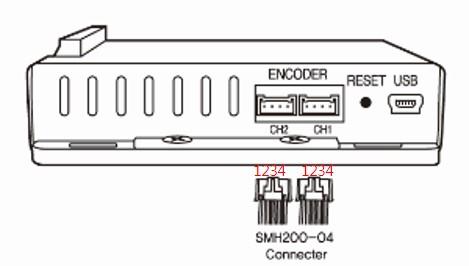
그림 3 엔코더 커넥터 연결
| Motor 2 Encoder | Motor 1 Encoder | |
| 1 | Motor 2 VCC | Motor 1 VCC |
| 2 | Motor 2 Encoder A | Motor 1 Encoder A |
| 3 | Motor 2 Encoder B | Motor 1 Encoder B |
| 4 | Motor 2 GND | Motor 1 GND |
제어기에 모터의 엔코더 포트(5V, GND, A상, B상)를 잘 구별해서 연결하기 바랍니다. 만약 엔코더의 A와 B상이 반대로 연결되었다면, 모터가 정회전 할 때 엔코더 카운트가 다운 카운트 됩니다. 반대로 모터가 역회전 하면 엔코더 카운트는 업 카운트 됩니다. 이런 상황에서는 엔코더의 A와 B상을 바꿔 연결해야 합니다.
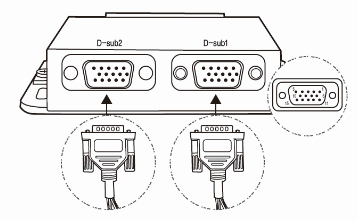
5.2 D-Sub 커넥터 연결
|
Pin |
Power |
COM |
DOUT |
DIN |
Ana |
Pulse |
Default Config |
| 1 |
DOUT1 |
Unused |
|||||
| 2 |
TxData |
RS-232 Tx |
|||||
| 3 |
RxData |
RS-232 Rx |
|||||
| 4 |
RC1 |
Unused |
|||||
| 5 |
Shield |
||||||
| 6 |
CANL |
CAN High |
|||||
| 7 |
CANH |
CAN Low |
|||||
| 8 |
RC2 |
Unused |
|||||
| 9 |
DOUT2 |
Unused |
|||||
| 10 |
ANA1 |
Unused |
|||||
| 11 |
ANA2 |
Unused |
|||||
| 12 |
DIN1 |
Unused |
|||||
| 13 |
GND |
||||||
| 14 |
5V Out |
||||||
| 15 |
DIN2 |
Unused |
그림 4 D-Sub 1 커넥터 연결
|
Pin |
Power |
COM |
DOUT |
DIN |
Ana |
Pulse |
Default Config |
| 1 |
DOUT3 |
Unused |
|||||
| 2 |
DOUT4 |
Unused |
|||||
| 3 |
DIN3 |
Unused |
|||||
| 4 |
DIN4 |
Unused |
|||||
| 5 |
Shield |
||||||
| 6 |
DIN5 |
Unused |
|||||
| 7 |
DIN6 |
Unused |
|||||
| 8 |
DIN7 |
Unused |
|||||
| 9 |
5V Out |
||||||
| 10 |
GND |
||||||
| 11 |
RC3 |
Unused |
|||||
| 12 |
RC4 |
Unused |
|||||
| 13 |
GND |
||||||
| 14 |
5V Out |
||||||
| 15 |
GND |
그림 5 D-Sub 2 커넥터 연결
5.3 USB(VCP) 커넥터 연결
사용자가 PC를 사용하여 제어기의 구성(configuration)을 설정하고 운용 하는 가장 간단한 방법은 제어기와 PC 간에 USB 연결을 구성하는 것입니다.

그림 6 제어기와 USB(VCP) 연결
USB의 VCP는 PC의 장치관리자에서 다른 시리얼 COM 포트와 동일하게 표시됩니다. VCP를 통해 시리얼 통신을 기반으로 하는 다양한 응용프로그램(예, HyperTerminal)을 사용할 수 있습니다. 또한, VCP는 사용자가 응용 소프트웨어를 쉽게 작성할 수 있도록 합니다. COM 포트를 열고 시리얼 데이터를 주고받는 것은 여러 프로그래밍 언어에서 잘 문서화 되어있으며 전통적으로 제어기와 통신하기 위한 가장 기본적인 방법입니다.
그러나 USB(VCP)는 노이즈에 약하고 통신 오류 발생 시 복구 가능성이 낮기 때문에 실제 현장에 배치되는 경우 RS-232 연결을 권장합니다
※ USB(VCP)는 제어기 설정 테스트, 모니터링 및 문제 해결 시에 사용하시기 바랍니다.
※ 리셋 스위치와 표시등은 사용자 설명서에 “제어기 공통 사항” 내용을 참조하시기 바랍니다.
6. 외관 및 치수