모바일 로봇 / 모바일 플랫폼 – STELLA B2
저희 연구소에서는 모바일 플랫폼이라는 제품군으로 STELLA 시리즈를 출시했었습니다. 처음에는 B1을 출시했고, 조금 펌웨어를 수정해서 B2를 출시했습니다.
동급 제품보다 아주 좋은 가격대를 제시할 수 있었는데요. 이 제품은 사용자의 MCU나 PC와 연결해서 각 종 주행명령을 인가하는 제품입니다. 그로부터 주행하는 로봇을 대상으로 사용자가 원하는 실험 혹은 움직임을 실험할 수 있는 제품입니다.
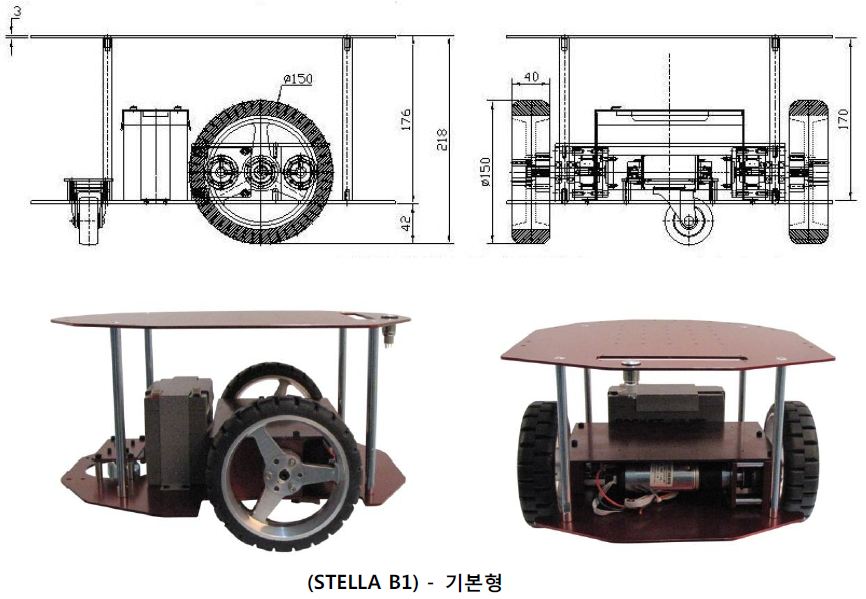
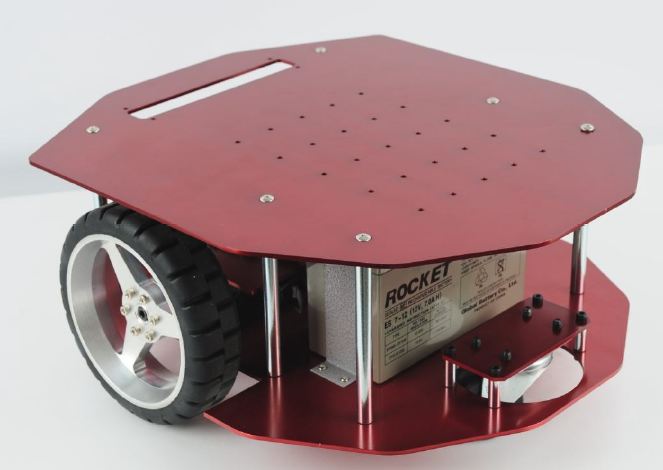
기본형의 모습입니다. 노트북하나를 올려다 놓고 사용하시기에 아주 적합한 형태입니다. 무선이든 유선이든 저희 메인 보드에 시리얼통신 연결을 하시고, 사용하시면 됩니다. 그림에 B1이라고 되어있지만, B2모델과 외형은 바뀌지 않았기 때문에 문제 없습니다.
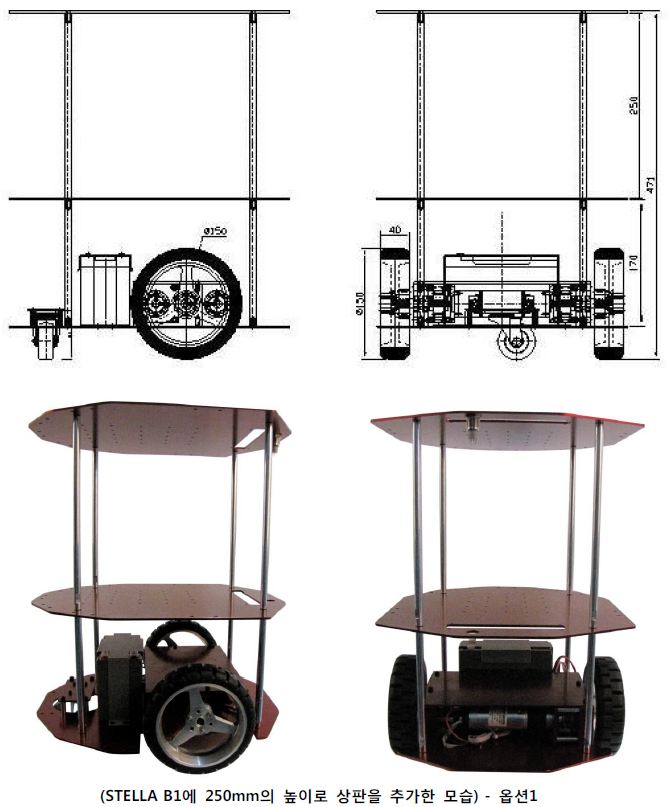
더불어 상판의 형태는 옵션선택을 통해 다양한 길이로 선택하실 수 있습니다.


이렇게 3종의 옵션을 선택하실 수 있습니다. 이를 통해 연구목적이나 혹은 학습용으로 사용하실때, 각종 센서나 보드의 추가가 용이하실겁니다.
여러 용도에서 모바일 로봇은 필요한데, 로봇을 만드는일(기구설계, 모터선정, 모터제어 등등)에는 관심이 없으신 분들께서 사용하시기 적합하실 것으로 생각됩니다.
위 동영상에서는 간단히 STELLA에 어떻게 명령을 인가하고 그 결과가 어떻게 나타나는지를 보여드리고 있습니다.
본 제품은 외부 센서 없이 완벽하게 위치를 제어할 수 있는 컨셉이 아닙니다. 많은 연구 분야에서 모바일 플랫폼을 필요로 하며, 모바일 플랫폼의 가격이 현재 500백만원 이상의 가격대로 아주 높게 형성 되어 있는 현실에서 저희가 이만큼 좋은 가격대를 제시할 수 있다는 하나의 성능 홍보로 위 동영상을 촬영한 것입니다. 실제는 메뉴얼에도 제시되어 있지만, 5%정도의 운영 오차를 가집니다. 즉 1m를 주행하라는 명령을 내렸다면, 5cm정도의 오차를 가집니다. 다시 말씀드리지만, 완벽하게 오차없이 이런 명령을 수행할려면 기어와 타이밍 벨트 등 많은 부분이 고가의 제품을 사용해야 합니다. 이것은 분명 제품의 가격 상승을 가져올 것입니다.


