[14호] 2011 캡스톤 디자인 공모전 우수상- 보행보조기구 1부
|

 참고문헌 | 인체해부학(신광출판사)-박형우 저 |
2.1. 해 석
2.1.1. 모터 선정 과정
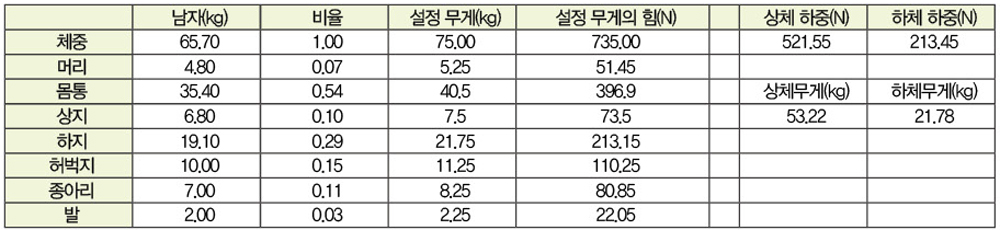
모터를 선정하기 위해 필요한 토크와 각속도를 구하기에 앞서 위에서 설정한 기준을 바탕으로 토크를 구하는 데에 필요한 하중을 구하였다.
(1) 토크 계산
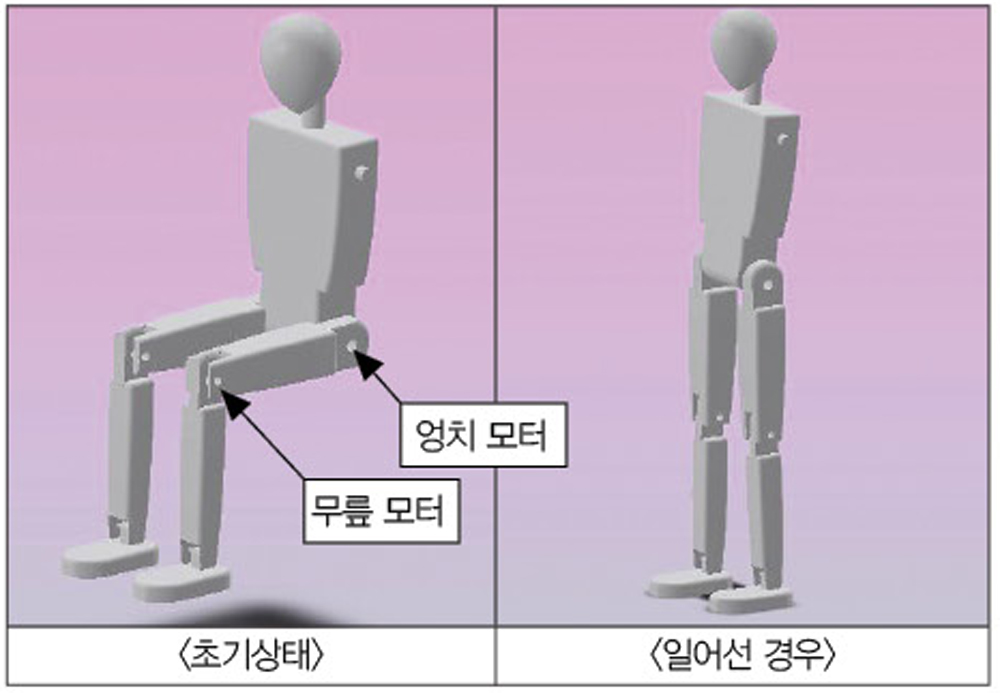
두 동작 중 걷기동작의 초기상태는 일직선이고, 일어서기 동작의 초기상태는 계단형에서 시작하므로 일어서는 경우가 걷는 경우에 비해 토크가 많이 걸린다고 판단하여 일어서는 경우를 기준으로 움직임을 해석하였다. 움직임의 해석은 Solidworks Simulation의 모션해석 기능을 이용하였다.
 |
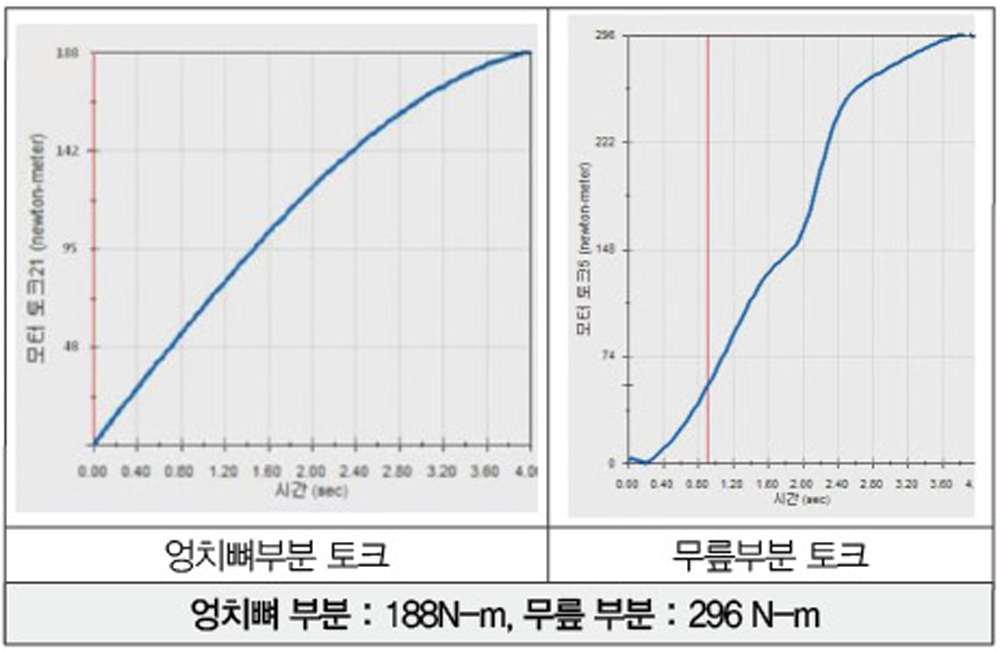
Solidworks Simulation의 모션해석기능을 이용해 무릎과 엉치뼈 부분에 모터의 조건을 주어 회전하였을 경우 가해지는 토크를 구하였으며, 그 결과 값은 다음 그래프와 같다.
 |
(2) RPM 계산
① 앉는 경우
4초 동안 엉치뼈가 80。, 무릎이 90。를 회전한다고 했을 때, 엉치뼈는 4.7rpm 무릎은 5rpm이 된다.
② 걷는 경우
한 발을 기준으로 2초 동안 엉치뼈가 20。, 무릎이 40。를 회전한다고 했을 때, 엉치뼈는 1.67rpm, 무릎은 3.33rpm이 된다.
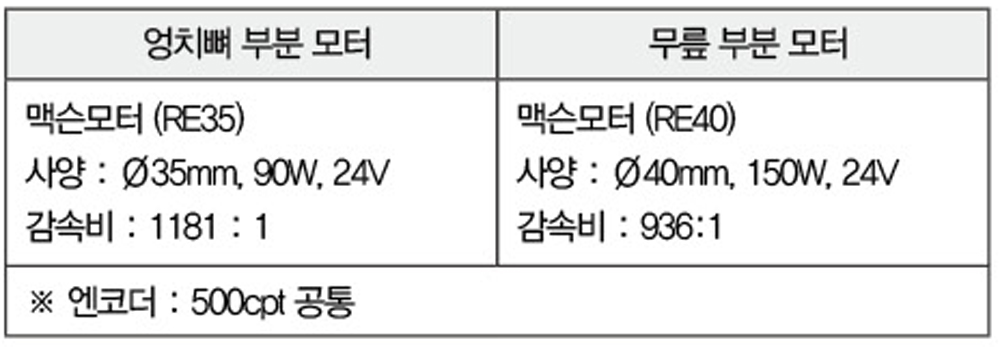
2.1.2. 최종 모터 선정
P=T*w의 식을 이용하여 최종적으로 엉치 90W, 무릎 150W의 모터로 선정하였으며, 크기와 출력 및 무게 등을 고려하여 MAXON사의 모터로 선정하였다.
 |
2.2 설계 방향
최대한 가볍고 간단한 구조를 목표로 한다.
① 고관절 및 허리 벨트부 설계 방향
- 엉치 뼈 모터를 고정할 수 있으며, 베벨 기어를 사용하여 모터의 움직임이 수직으로 축에 전달될 수 있도록 설계하였다.
② 무릎 관절 부분 설계 방향
- 고관절 부분과 전체적인 구조는 비슷하나, 종아리 및 허벅지 프레임과 간섭이 생기지 않도록 설계하였다.
- 모터 축과 수직으로 연결되도록 하였다.
③ 발목 부분 설계 방향
- 위의 분석결과를 토대로 모터를 장착하지 않고 복숭아뼈 부분의 움직임을 전후 10도, 총 20도로 제한할 수 있도록 하였다.
3. 상세 설계
본 작품을 착용할 사람을 기준으로 관절의 중심위치 및 하체부분의 길이를 측정하였다.
앞서 분석했던 결과를 통해 작품을 착용할 사람의 엉치 뼈, 무릎, 발목 부분에서 점 3개를 찾아 그 점을 기준으로 각 부분별 길이를 측정하였다. 오른쪽 그림은 옆면을 기준으로 사람이 서있을 때 점들 간은 일정 각도를 가지고 있다는 것을 참조하여 측정하였다.
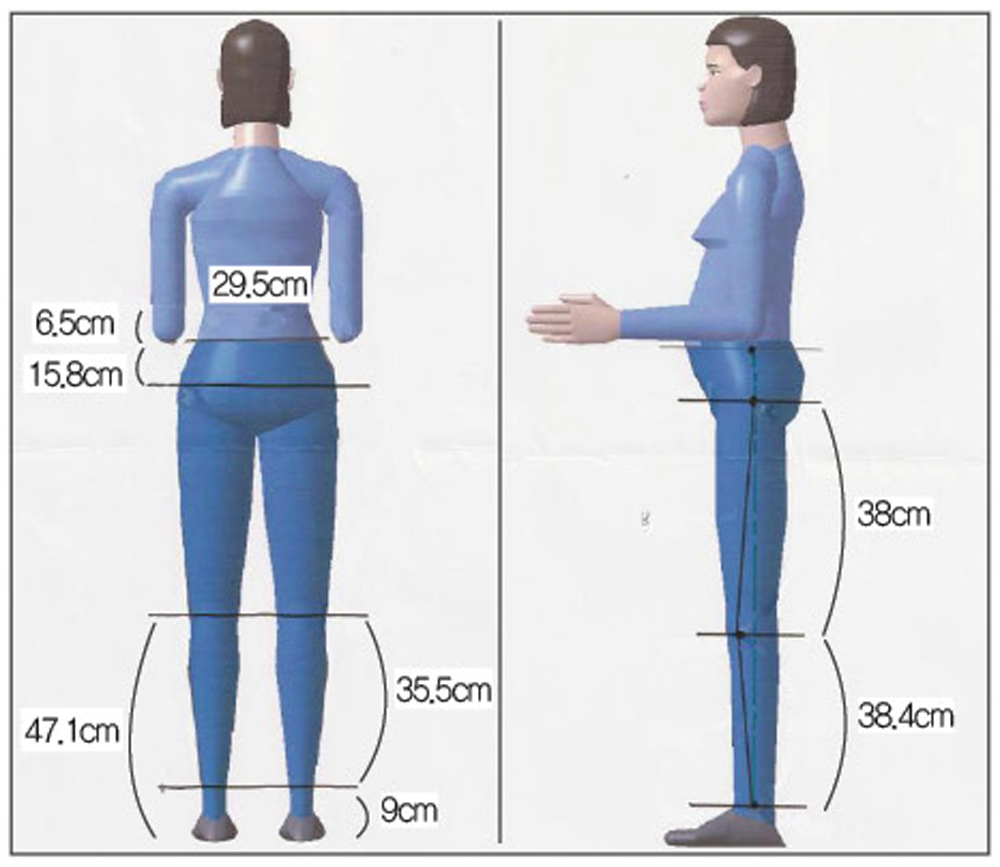 |
위의 그림에서 검은 선은 뼈대를 나타낸 것이고, 파란 쇄선이 다리 면적의 이등분선을 나타낸 것이다.
3.1 3D 설계
① 고관절부
 |
 |
 |
허리에 보호대를 덧대어 모터를 고정한 후 베벨기어를 이용하여 모터의 구동을 수직으로 전달한다. 길이조절을 위해 모터 고정부와 프레임과의 거리가 착용자의 고관절 위치에 따라 유동적으로 체결이 가능하게끔 하였고, 관절면의 경우 사람의 몸에 최대한 잘 접합되도록 밴딩 처리를 하여 프레임에 고정하였다. 관절면의 재질은 강도가 높은 Steel로 제작하여 충분한 힘을 버티고 전달할 수 있게 한다.
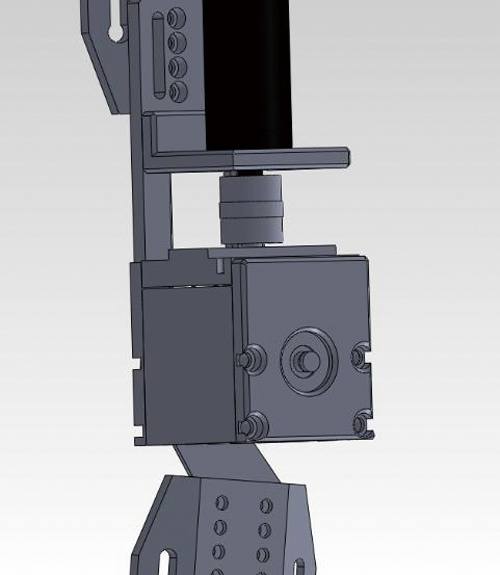
② 무릎 관절부
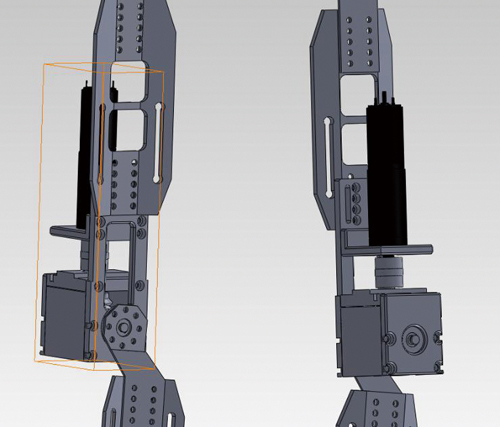 |
허벅지와 수평으로 모터를 고정하고 베벨기어를 이용하여 모터의 구동을 관절부에 수직으로 전달한다. 기어박스가 위치하는 관절부의 관절면의 경우 무릎의 회전중심점이 허벅지와 무릎의 중심축보다 앞에 있음을 고려함과 함께 종아리 프레임과의 연결을 자연스럽게 하기 위해 사선으로 관절면을 만들어 프레임과 고정하였다. 또한, 고관절부와 동일한 방식으로 밴딩 처리를 하였고 고정부에 길이조절부를 추가로 설계하였다. 종아리 부분의 프레임의 경우 종아리의 제일 두꺼운 부분을 기준으로 치수를 재어 최대한 사용자의 몸에 밀착될 수 있게끔 하였다. 종아리에서 두꺼운 부분을 지나 얇아지는 부분의 프레임을 절단하고 발목부분을 연결하는 고정면을 덧대어 발목부분을 구속시킨다. 관절면의 재질은 고관절의 관절면과 동일하게 Steel로 제작한다.
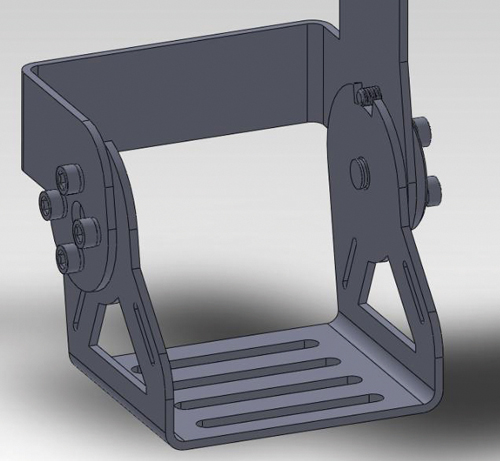
③ 발목
 |
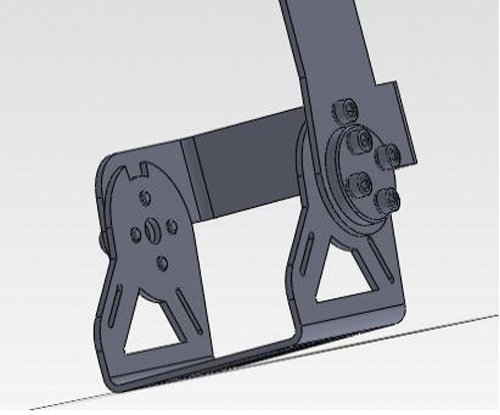 |
발목 부분의 전·후 10°의 움직임이 가능하도록 하였고, 발목 부분의 회전중심점이 복숭아뼈 부근이라는 것을 이용하여 관절부를 복숭아뼈의 위치와 같게끔 하였다. 착용자의 발을 신발바닥의 굽 홈에 걸어 들어 올리는 방식으로 제작하였으며, 힌지 핀을 완전한 원형이 아니라 약간의 움직임이 가능하게끔 해당 각도만큼 홈을 추가로 가공하여 발목 고정면에 고정한 나사를 이용하여 걸리게끔 구속조건을 주었다. 고관절부, 무릎 관절부와 마찬가지로 길이조절부를 추가로 설계하였다.
④ 길이 조절부 및 프레임
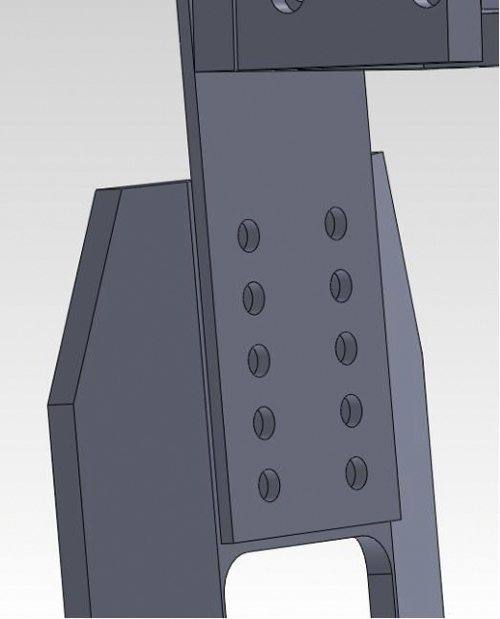 |
사람의 다리길이가 서로 다른 것을 고려하여 각각의 관절면에 길이 조절이 가능한 부분을 추가하였다. 나사를 이용하여 모터 고정부의 위치를 조절할 수 있게 하여 다양한 사람이 사용가능하게 하였다.
관절부를 제외한 전체 프레임의 경우 기성품 프로파일 중에 사람의 다리에 제일 잘 접합되는 프로파일을 찾아 설계에 이용하였다. 충분한 강도와 각도를 가진 프로파일을 가공하여 프레임으로 제작하였다. 프로파일의 가공의 경우, 모터 등을 고정하기 위해 프로파일 윗부분을 가공하여 평면을 만들고, 최대한 착용자의 몸에 밀착되게끔 다듬질을 하였다. 또한, 착용자의 몸과의 고정 및 밀착력이 증대되도록 도와주는 벨크로가 통과할 수 있도록 양쪽에 작은 홈을 내었다.
3.2 상세 도면
3.1 허리 부분 도면
① 배터리 케이스 및 컨트롤러 케이스
배터리 케이스와 컨트롤러 케이스 도면이다. 아크릴로 가공하였고, 허리부분에 장착하여 사용할 수 있게 제작하였으며 컨트롤러의 연결선에 간섭을 최대한 줄여서 설계를 하였다.
 |
 |
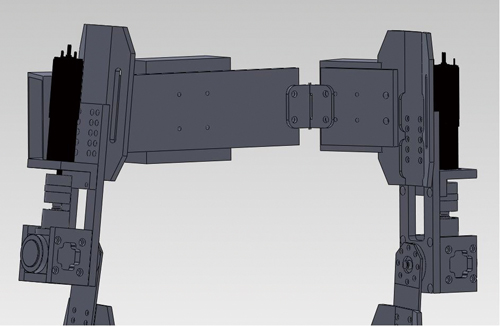
② 허리 부분 설계 도면
하체의 양쪽 기구부를 연결하여 전체적인 기구부의 고정이 되도록 한다. 양쪽 기구부의 연결은 기성품 경첩을 이용하여 각도를 용이하게 조절할 수 있도록 하였다.
 |
③ 경첩
허리 부분을 감싸안을 수 있게 연결부분을 사각접이문 경첩(기성품)을 구매하여 사용하였다.
④ 고관절부
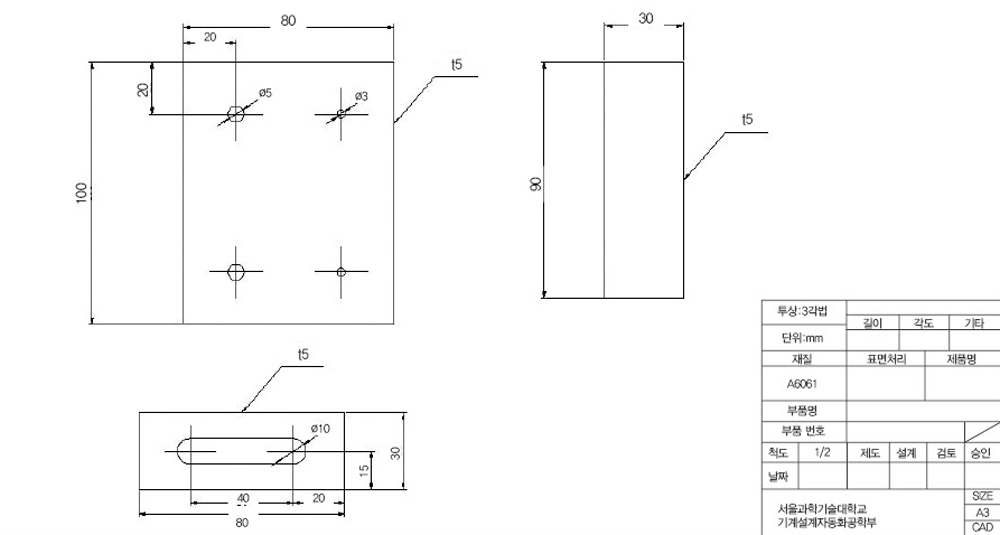
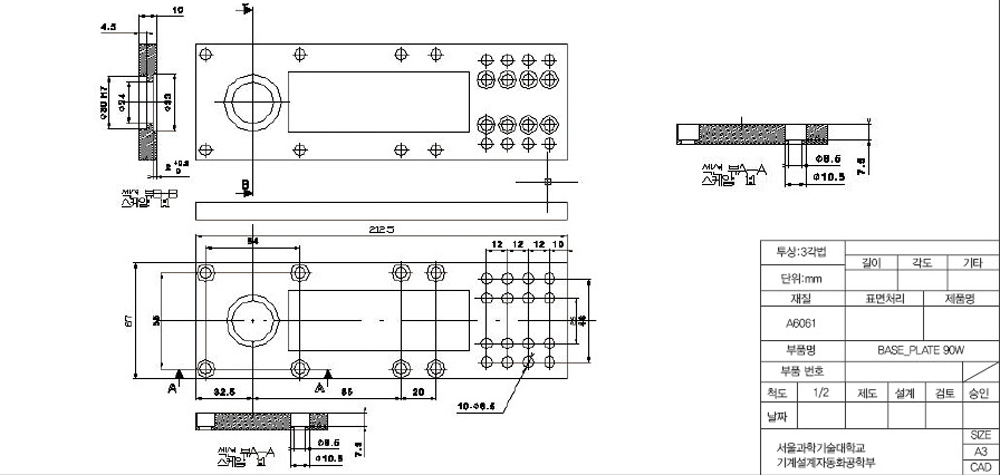
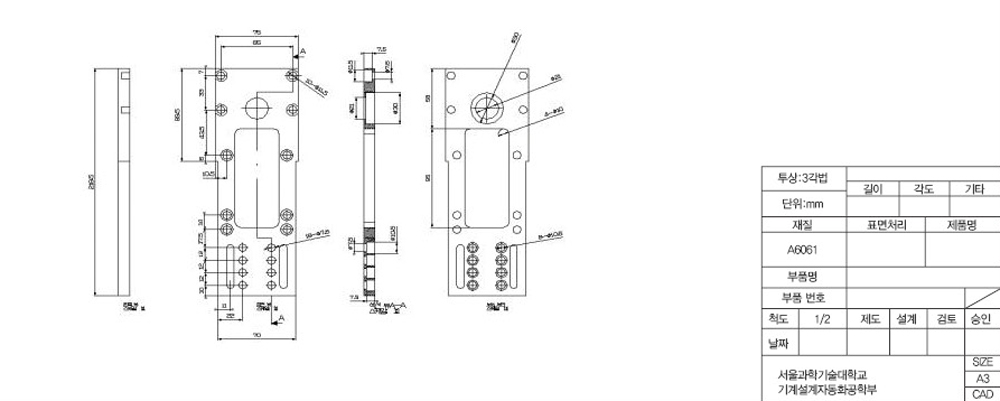
Base Plate
모터와 베벨기어를 연결해주면서 지지해주는 지지대이다. 90W 모터에 맞추어 설계하였으며 전체 기구의 경량화를 위해 추가적인 절삭가공을 하였다. 플레이트의 하단 부분의 8개의 나사구멍은 길이 조절을 위한 것들이다.
 |
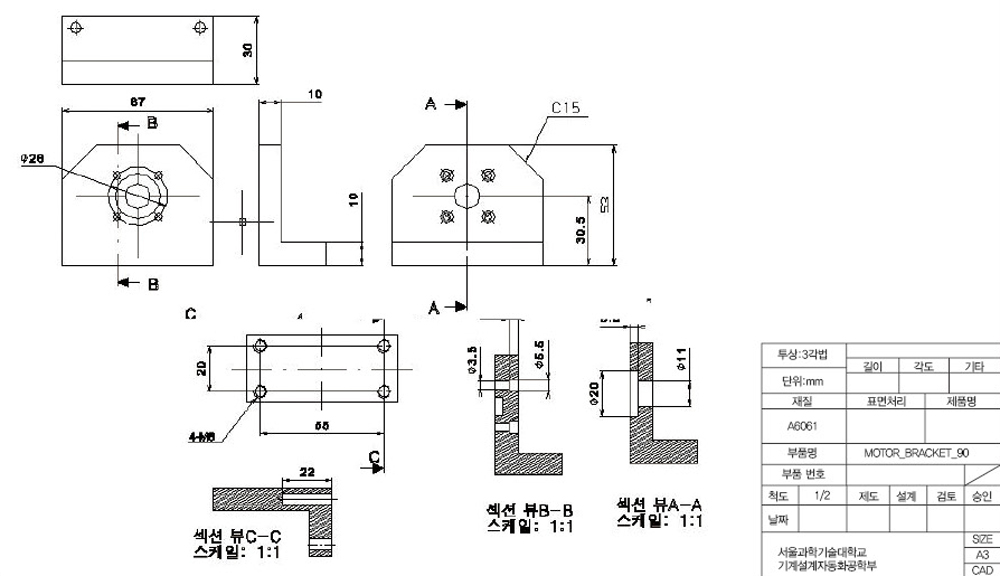
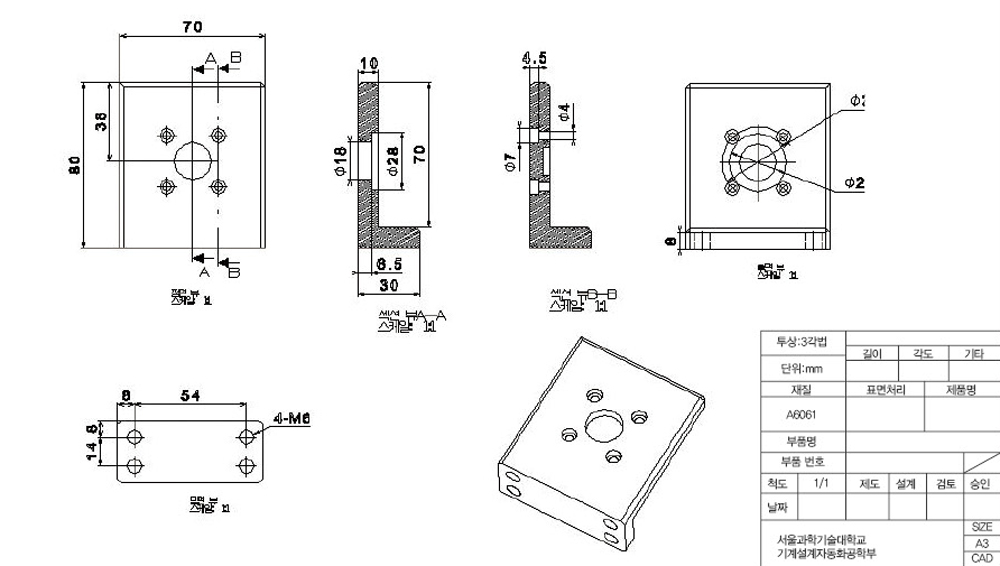
⑤ 모터 브라켓
90W 모터를 고정시켜주면서 지지대와 고정되는 역할을 하는 브라켓이다.
 |
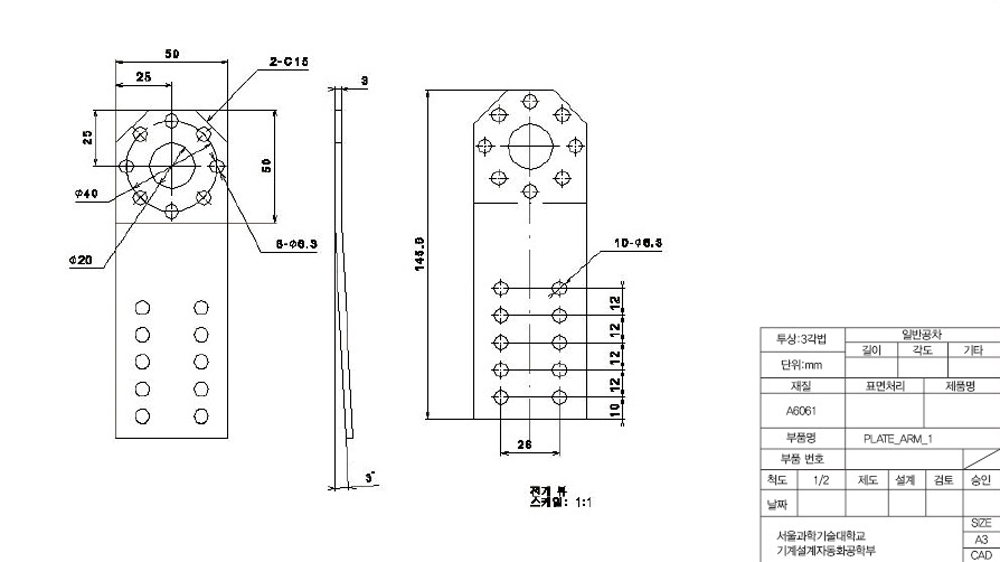
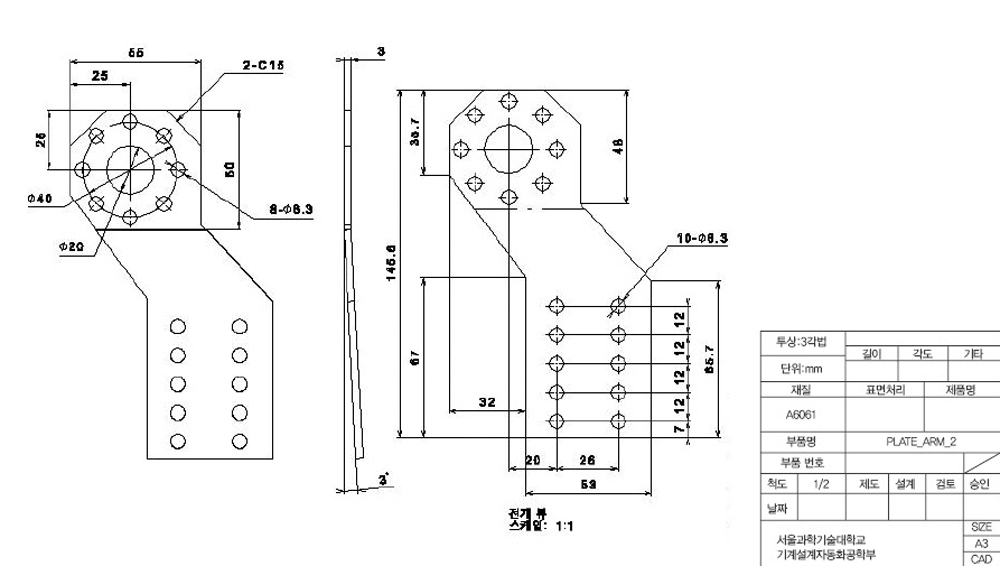
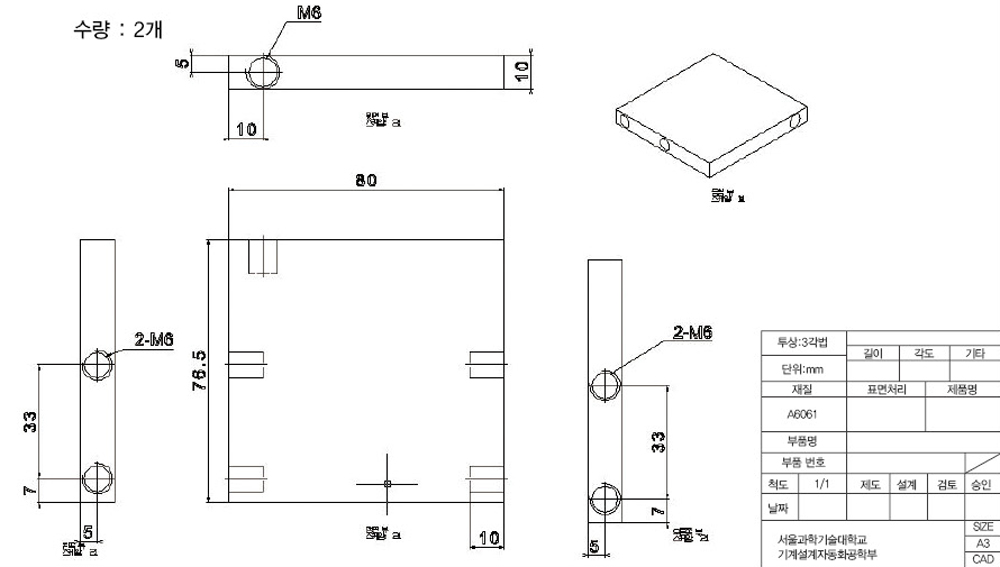
⑥ 허리 관절면
허리 부분의 모터의 힘을 전달하여 지탱하는 플레이트 암이다. 인체는 일자의 몸이 아니라 평균 허리아래 부분부터 몸이 안쪽으로 들어가는 것을 고려하여 약간의 각도를 주어 설계하였으며, 허벅지 프레임과 모터를 연결해주는 부분이므로 알루미늄보다 강도가 강한 스틸을 사용하였고 하단의 나사 구멍들은 길이조절을 위한 것이다.
 |
⑦ 허리 관절부 기어박스
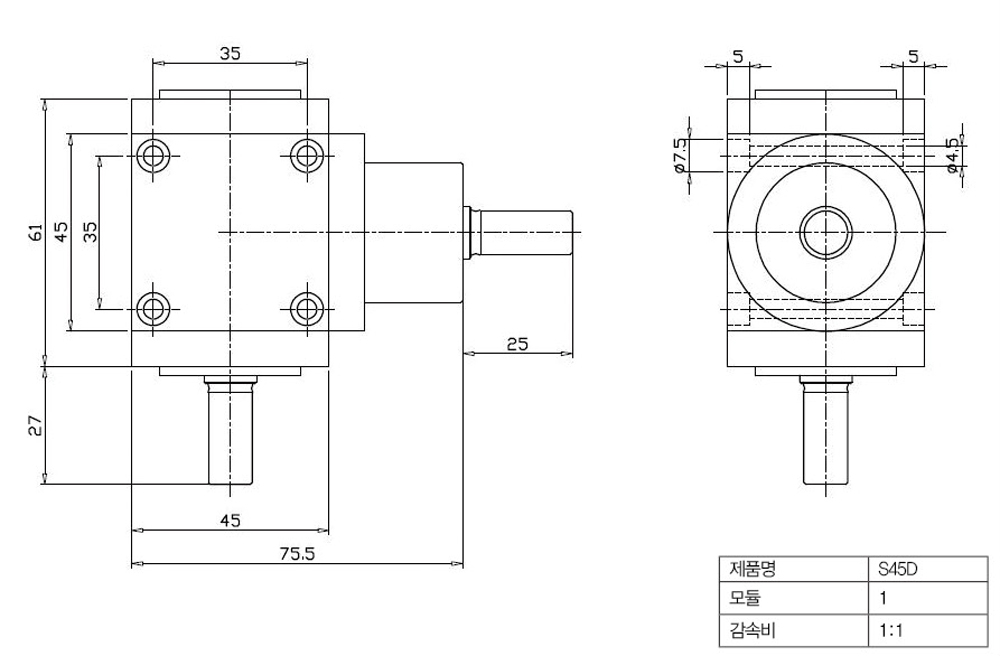 |
3.2 무릎부 설계
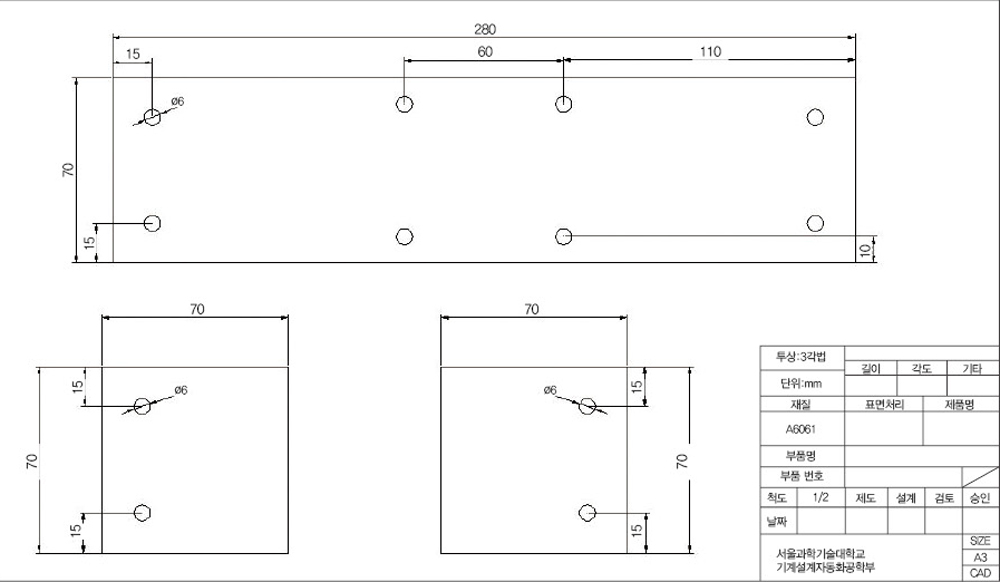
① 무릎 관절부 Base Plate
모터와 베벨기어를 연결해주면서 지지해주는 지지대이다. 150W모터에 맞추어 설계하였고, 전체 기구의 경량화를 위해 추가적인 절삭가공을 하였으며 하단부의 8개의 나사구멍은 길이를 조절할 수 있게 만든 나사 구멍이다.
 |
② 모터 브라켓
150W 모터를 고정시켜주면서 지지대와 고정되는 브라켓이다.
 |
③ 무릎 관절면
모터의 힘을 무릎 아래 부분과 연결해주는 플레이트 암이다. 무릎 부분은 인체 구조상 회전 중심점이 일직선이 아니라 무릎 뼈 앞부분에 있다는 것을 고려하여 인체에 최대한 접합되도록 설계하였으며, 모터의 동력과 기구부의 무게를 견뎌야 하므로 스틸을 사용하였다.
 |
3.3 기어 및 기어박스
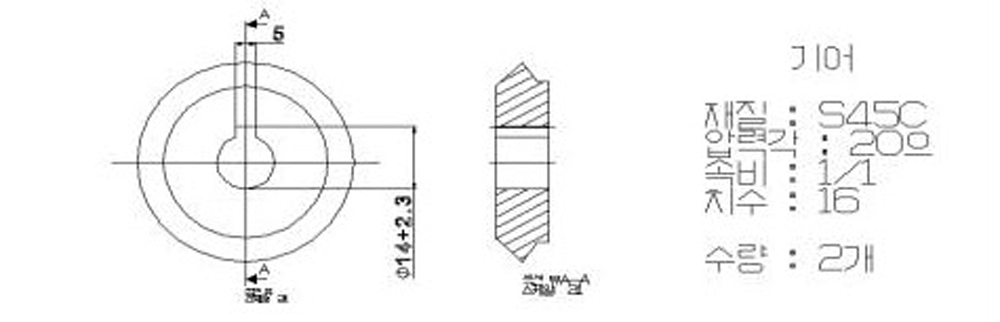
① 기어
기어 모듈 2.5 (기성품) 치수를 기준으로 그린 도면이다.
 |
② 하단기어 중심 고정부
기어가 받는 힘이 크기 때문에 축과 기어에 안전하게 힘이 전달되도록 베어링을 2개 사용하여 힘을 지지하였다.
 |
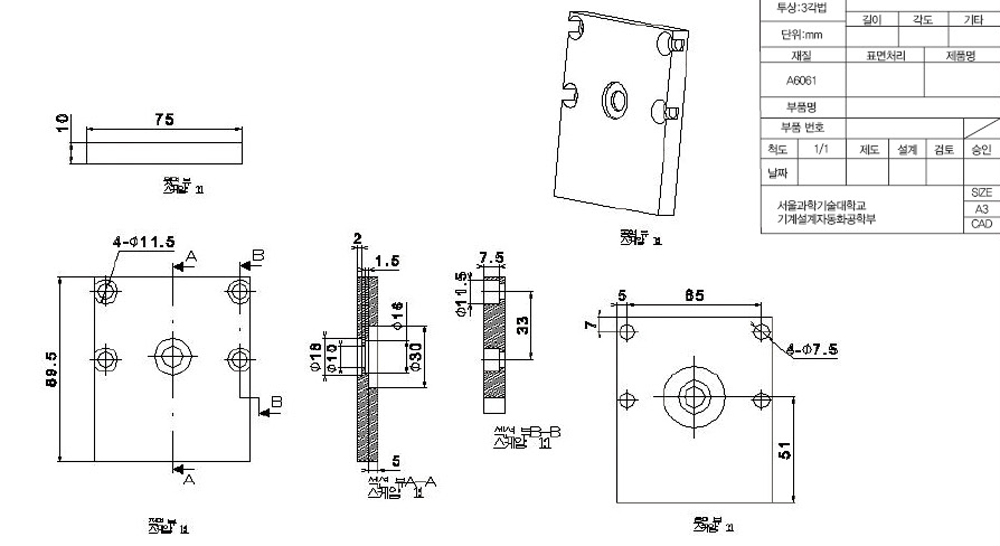
③ 측면기어 중심 고정부
하단기어가 흔들리지 않고 밀림이 없게 고정해주는 부분이다.
 |
<
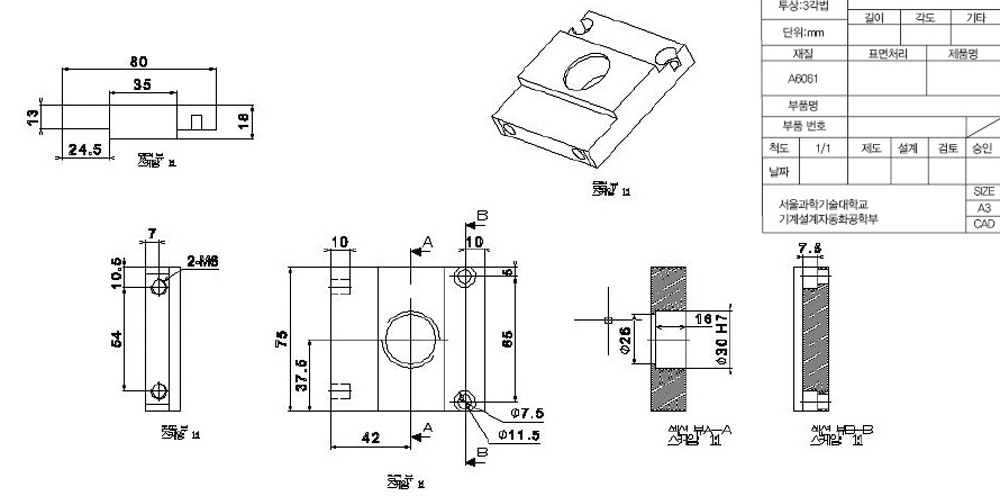
④ 기어박스 (옆면 고정부)
기어의 중심을 모두 잡아 버티며, 두 기어축에 실리는 힘을 분산시키는 역할을 한다.
 |
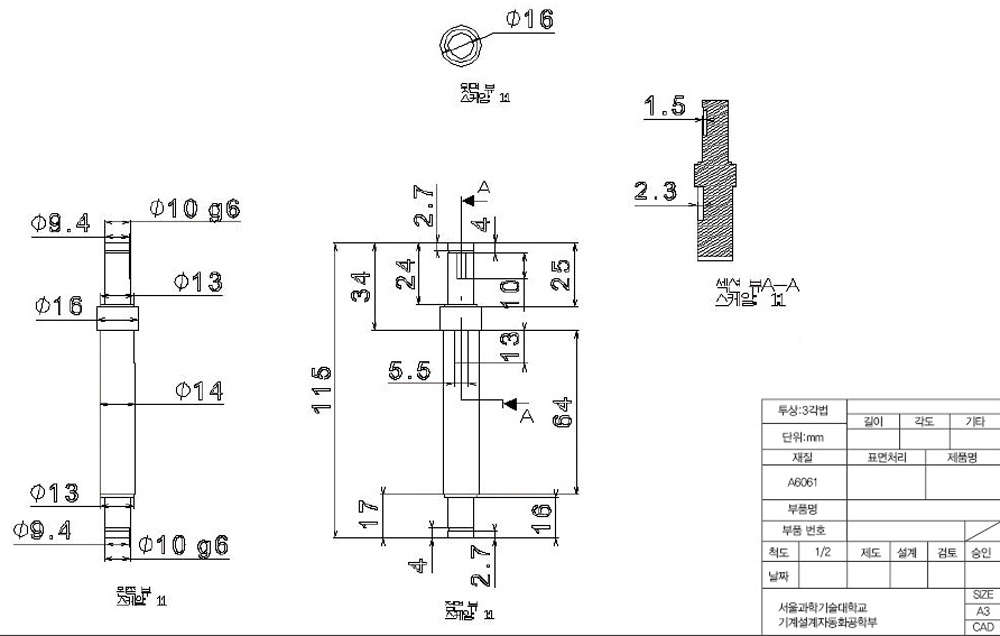
⑤ 샤프트 (하단 기어 및 측면 기어)
샤프트와 기어에 키 홈을 내어 헛돌지 않게 하였고, 기어에 받는 힘을 고려하여 단차가공을 하였다.
 |
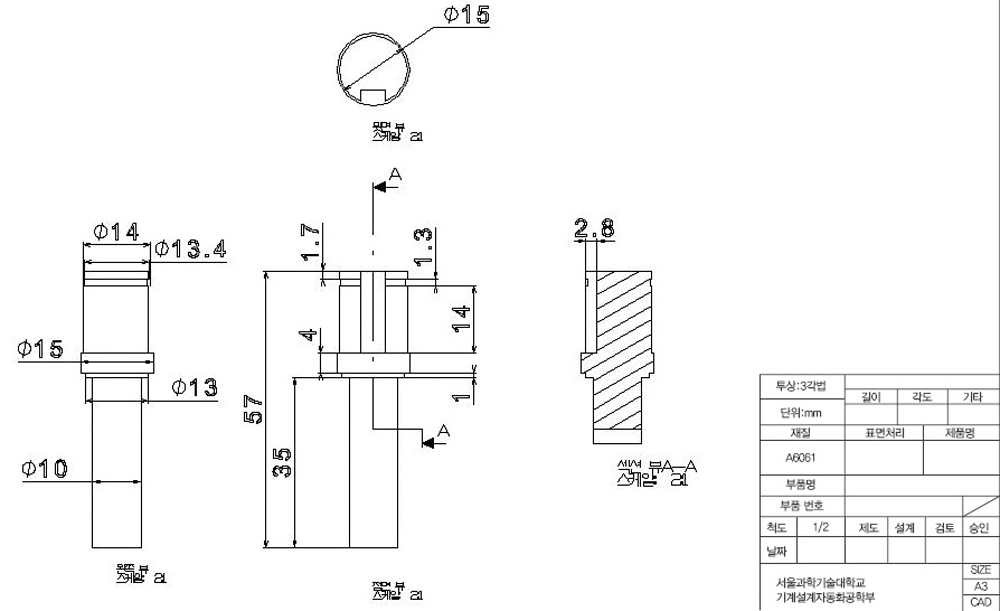
⑥ 로터 플랜지
모터의 힘을 받아 플레이트 암에 전달하는 로터 플랜지이다. 모터의 힘을 1차적으로 받기 때문에 강도 높은 스틸을 사용 하였다.
 |
3.4 발 부분 설계
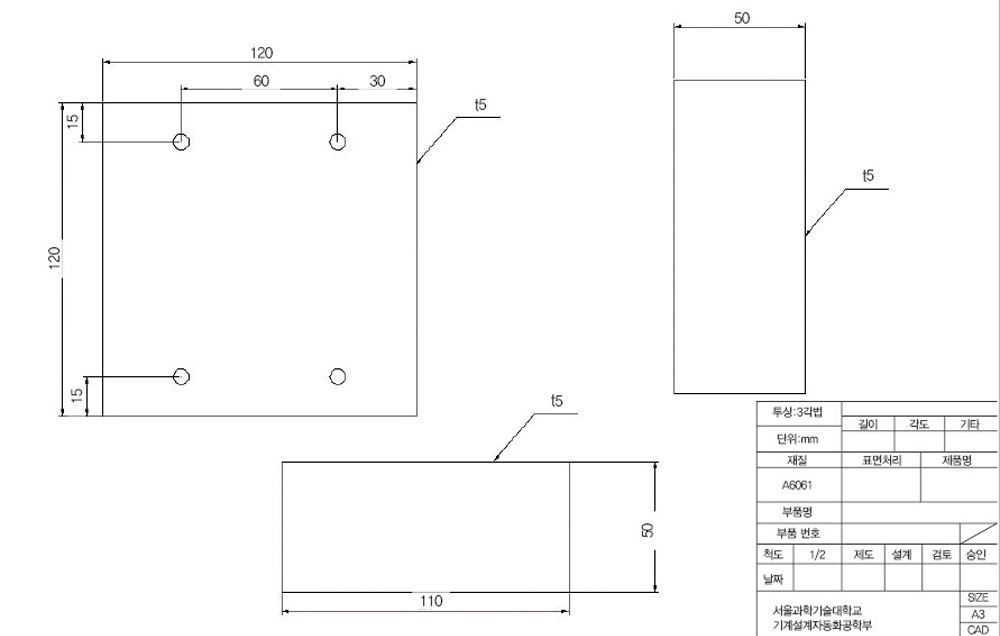
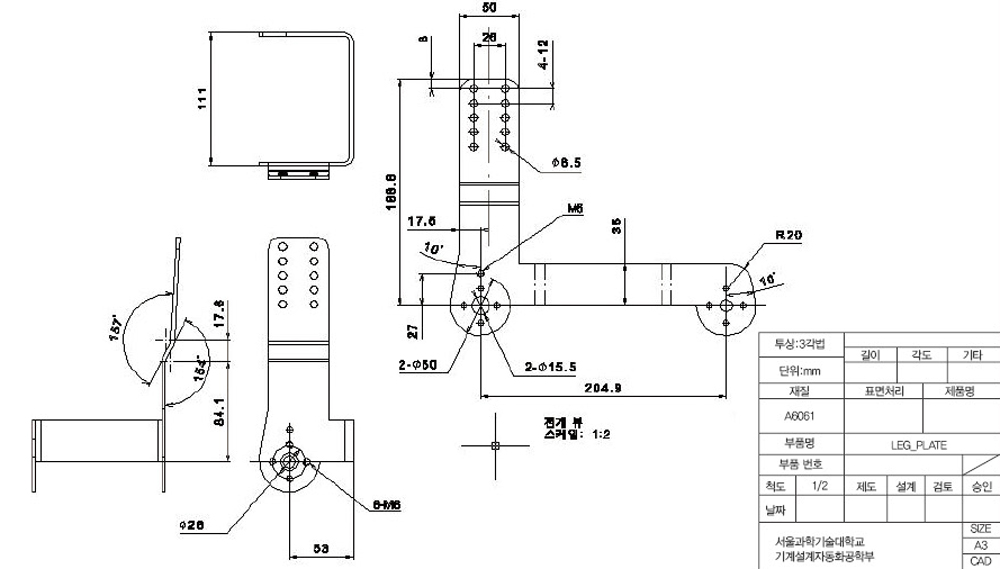
① 렉 플레이트
종아리와 발목 사이 역시 곡면이므로 그것을 고려하여 각도를 주어 설계하였고, 풋 플레이트를 지지하면서 기구 구동 시 발이 뒤로 빠지지 않게 보조해주는 역할을 한다.
 |
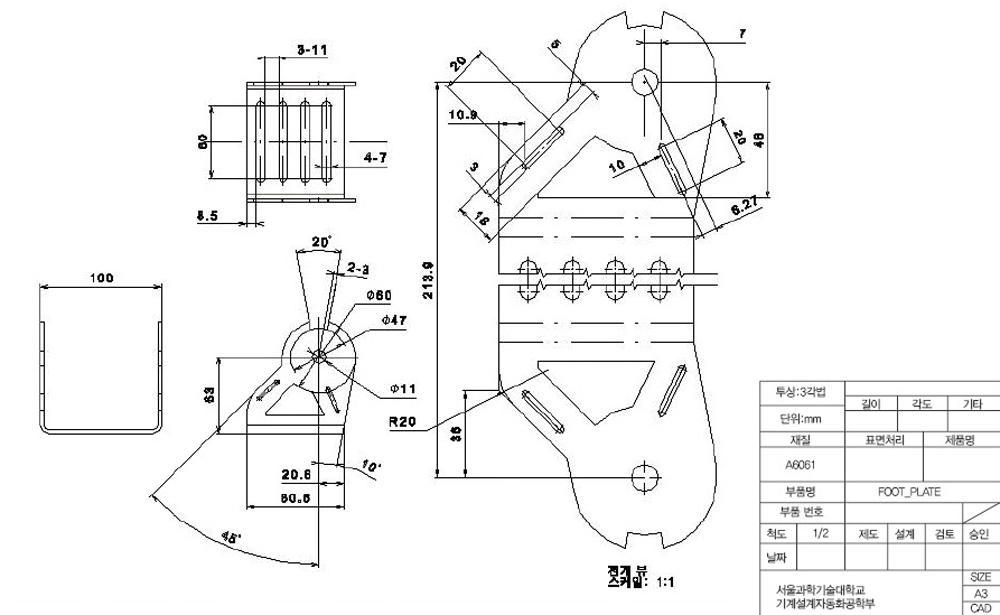
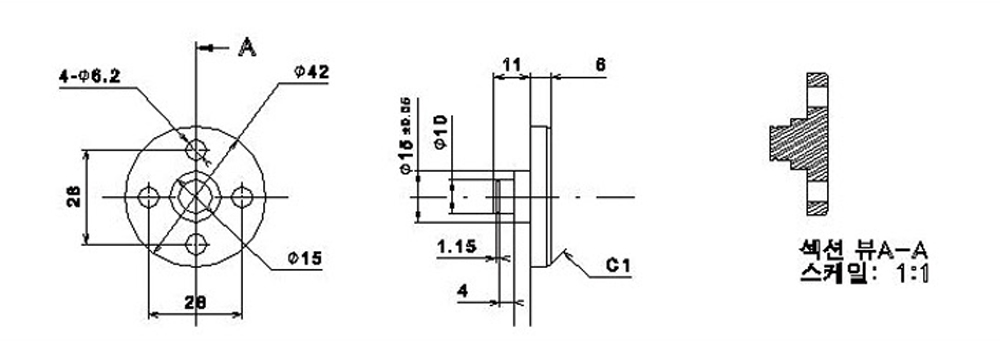
② 풋 플레이트
구동시 착용자의 발목을 잡아주면서 자연스럽게 전후 10°의 여유를 주어 움직일 수 있도록 설계하였다.
 |
③ 힌지 핀
 |


