[13호]Mechanism Using Roving Mars
2011 디바이스마트 캡스톤 디자인 공모전 입선작
Mechanism Using Roving Mars
팀명 | I.M.F 참가자 | 조선대학교 제어계측 로봇공학과 / 문요한, 강현창, 조성광

I.M.F팀의 수상장면
심사평
기구구성 입장에서 도전적인 아이디어로 접근한 과제로서 높게 평가한다. 특히, 설계전에 타당성을 확인하는 과정은 학부생들임을 감안하면 좋은 태도이다. 그러나 역시 경험부족과 좀 더 깊은 고민이 부족하여 애초 기획단계에서 한계점이나 보완점이 있다는 것을 간과한 것이 아쉽다. 과제 기획단계부터 심사한 입장에서는 그러한 부족한 점이 있다는 것을 알고 있었지만 그것을 극복해가는 과정을 과제 수행자들이 어떻게 보여줄 수 있을가 하는 점이 또한 관심이었다. 물론 결과적으로는 애초 계획대로 완성하지는 못했지만 과제를 수행해가는 과정은 좋았다고 평가를 하였다.
1. 개발 동기
현재에 들어 와서는 우리 주변에 다양한 로봇들이 존재 한다.
다리를 사용하는 족 로봇, 바퀴를 사용하는 모바일 로봇, 메커니즘 Wheel을 이용한 로봇 등 다양한 로봇들이 있다.
각각의 로봇들이 극복할 수 있는 지형은 한정적이며 좀 더 험한 지형을 극복하기 위해서는 많은 모션과 그에 따른 제어가 필요해지며 불안정해진다. 이러한 문제점을 보완하기 위해서 이동성이 좋은 모바일 로봇의 장점과 메커니즘을 이용한 기구부 설계를 통해 지형적 환경에 구애 받지 않고 효율적인 주행을 할 수 있는 로봇을 제작하고자 한다.
2. 개발 목적
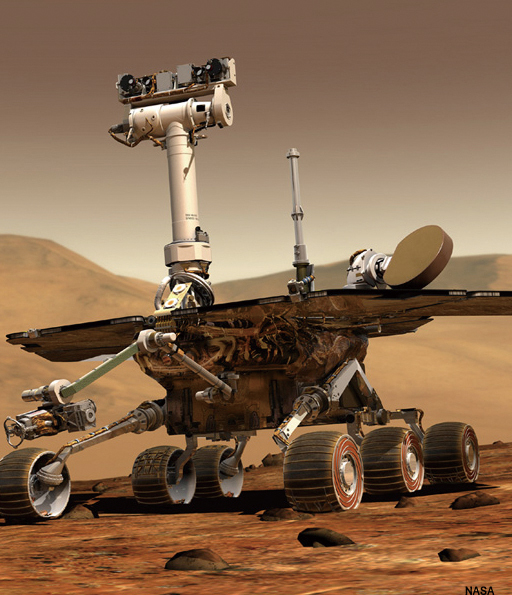
화성탐사로봇 스피릿
예로 화성탐사 로봇의 발전을 보면 우리가 모르는 지형을 극복해 화성을 돌며 자료를 보내주는 로봇은 미지의 지형에서의 이동을 위해 여러 가지를 고려한 이동메커니즘을 가지고 있으며 탐사로봇이 아닌 다른 로봇들도 특정 상황에 맞는 이동메커니즘을 가지고 있다.
우리도 이러한 흐름에 맞혀 기존에 나온 이동메커니즘이 아닌 좀 더 새로운 이동메커니즘을 적용한 모바일로봇을 만들고자 하며, 우리는 새로운 이동메커니즘을 적용 탐사로봇이나 이동이 불편한사람의 이동수단이 될 수 있도록 로봇을 설계 제작한다.
3. 개발 목표
1) 3D 모델링
안정적인 프레임 설계를 하기 위하여 Inventor tool를 사용하여 기구부를 미리 설계해보며 동·정역학을 통한 계산을 통해 기구부를 검증하며 우리가 생각한 이동 메커니즘을 적용 극복할 수 있는 장애물에 대한 검증을 한다.
2) 볼 나사를 이용한 이동 축 구성
기구부를 설계과정에서의 메커니즘을 적용할 수 있는 하단부와 상단부 사이의 이동을 원활히 하기 위하여 볼 나사를 이용 마찰력을 최대한 줄이며 영구성을 높이고 정확한 제어부로 무게중심을 잘 잡을 수 있도록 설계한다.
3) 센서를 이용한 자율주행 모드
각종 센서를 이용 현 시대에서 중요도가 높아진 자율 이동을 구현한다.
4) 전류 센싱을 통한 모터제어
전류를 제어하는 방식으로 모터에 과부하가 걸렸을 때 검출되는 전류 값을 이용한다. 이 값을 이용하여 중단부의 축을 바퀴 축과 일치 시켜 원활하게 회전할 수 있도록 한다.
5) 통신을 이용한 통합 컨트롤
우리 로봇의 특성상 축의 자유로운 이동과 바퀴의 회전을 보장하기 위해 배선 문제를 고려해야 한다. 이러한 단점을 보완하기 위해 각각의 컨트롤러를 따로 설치, 통신을 이용하여 통합 컨트롤 함으로써 단점을 극복한다.
6) 보조적인 기구부 제작
안정적인 주행과 무게 중심을 맞추기 위하여 필요에 따라 보조 적인 기구부를 제작한다.
7) 솔라셀을 이용한 전원 공급
로봇의 특성에 맞게 수동적인 충전보다는 솔라셀을 이용하여 자동충전을 함으로써, 반영구적인 로봇의 형태를 가질 수 있도록 한다.
8) 카메라를 이용한 영상의 처리
탐사로봇의 목적에 맞게 촬영한 영상 데이터를 다른 매체에 송신, 저장 할 수 있도록 구성한다.
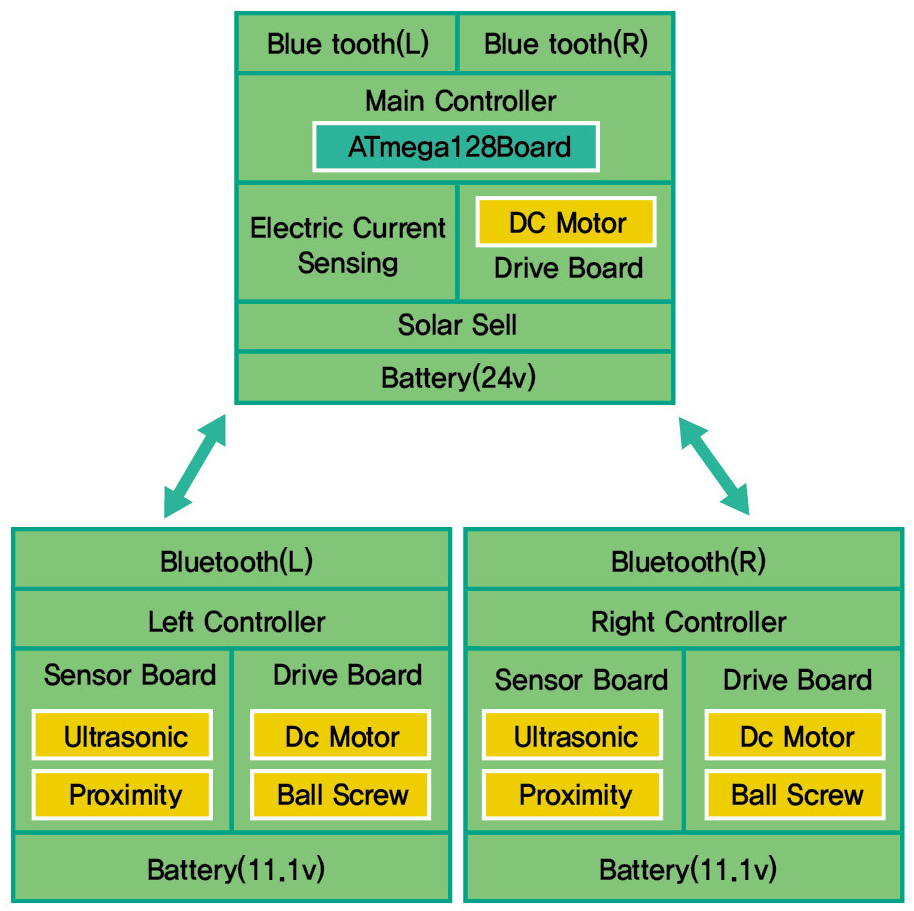
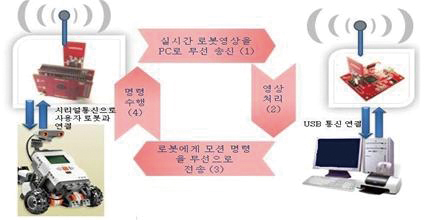
4. System Architecture
5. 개발내용
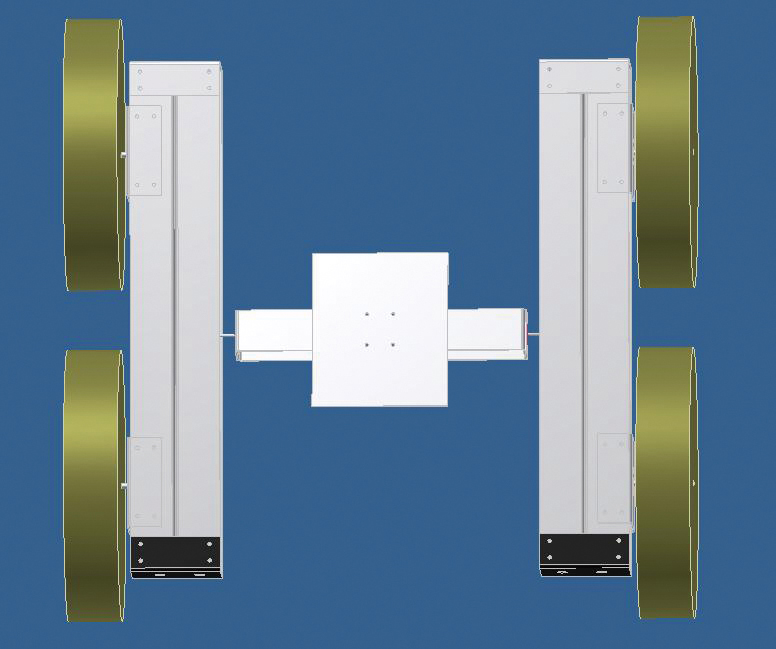
1) 3D 모델링
(Wheel weight(etc..) + Frame weight +
(Motor weight*Number Of Motor)) x 9.8=B
B x distance=C
A>=C
그 결과 처음에 알루미늄 재질의 프레임을 설계 하려고 하였으나 전체적인 프레임의 무게가 무거워 지면서 현재 가지고 있는 모터에 과도한 부하가 걸리게 될 것이라고 예상되어 프레임의 재질을 바꿔 현재 MC가공을 통해 하단부의 무게를 줄이는 반면 재질의 강도를 적절한 수준으로 선정할 수 있었습니다.
 |
 |
제작한 프레임의 총 무게를 봤을 때 모터에 과부하를 준다고 판단하여 MC가공을 통한 프레임 설계를 하였습니다.
- |
 |
2) 프레임 제작
 부품 1 |
 부품2 |
 부품3 |
 결합1 |
 결합2 |
 결합3 |
 결합4 |
 결합5 |
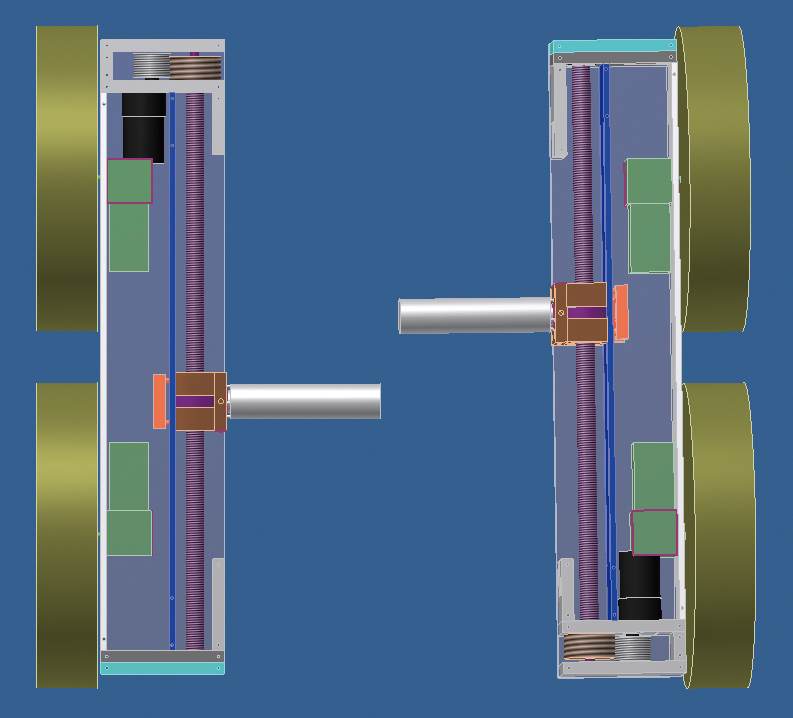
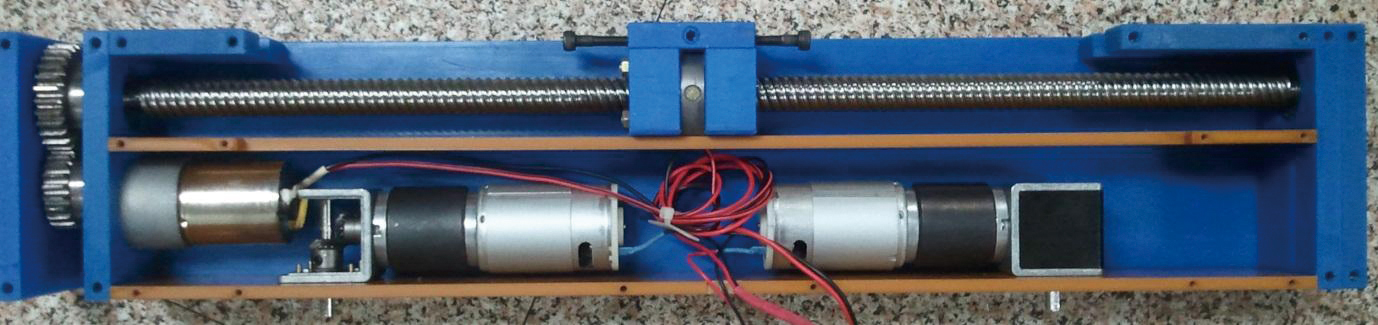
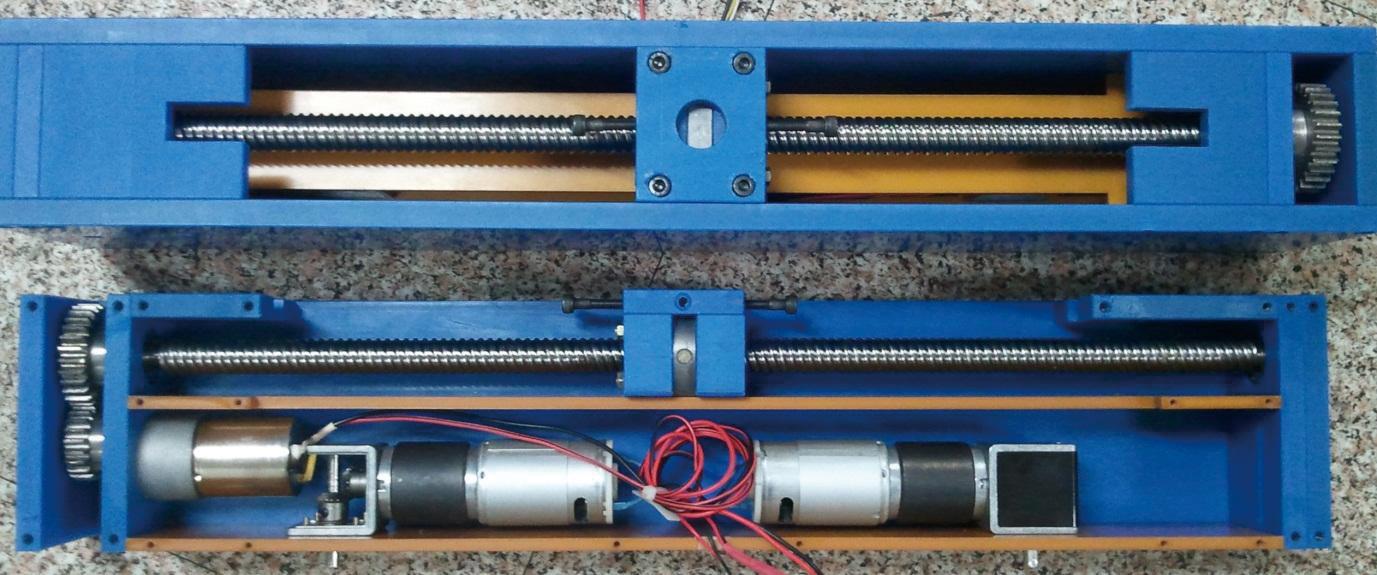
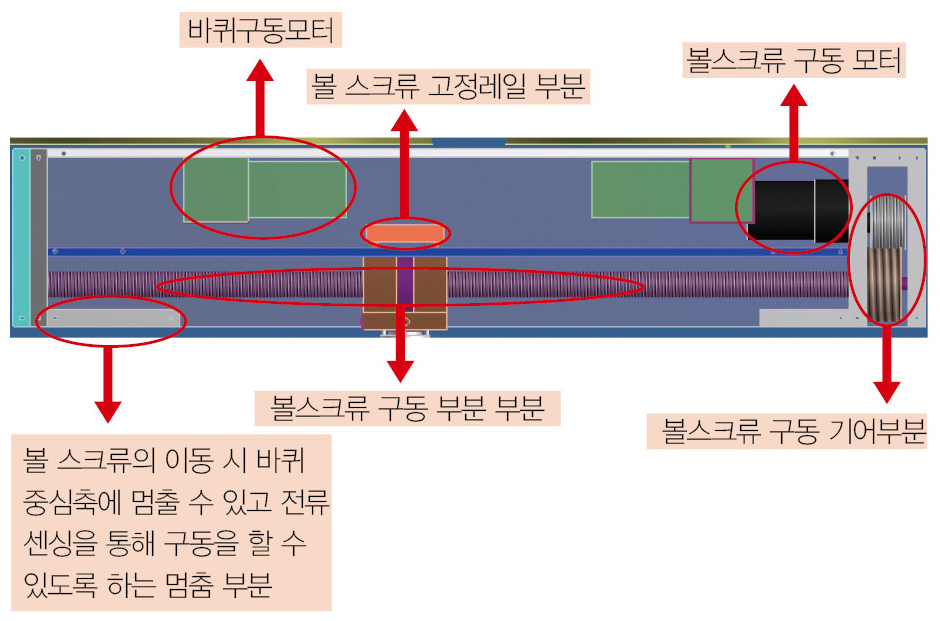
총 10개의 부품의 모델로 제작 하였으며, 조립 형태로 제작을 하였습니다. 모터 고정 부와 중앙 볼 스크류 지지대는 두께를 기본 외형 프레임보다는 얇게 설계하여 최종적으로 제작을 하였고, 볼 스크류 구동에서 전류 센싱을 위한 칸막이를 제작하여, 볼 스크류가 자동적으로 양쪽 바퀴 축 중심에 와서 멈출 수 있도록 하였고, 볼 스크류가 회전시에 마찰을 줄이기 위하여 양쪽 끝 프레임에는 베어링을 넣을 수 있는 공간과 차후 초음파 센서를 넣을 수 있는 부분을 제작하였습니다.
먼저 프레임 제작에 있어서 2차까지의 프레임 가공을 기본으로 하였고 3차에서 찾아낸 2차 프레임의 문제점들을 보정하기 위하여 중심부에 샤프트 고정부를 추가적으로 제작하게 되었으며 장애물 감지와 회피를 위하여 초음파 센서를 연결부에 장착하게 되었습니다.
초음파 고정부
총 10개의 부품의 모델로 제작 하였으며, 조립 형태로 제작을 하였습니다. 모터 고정 부와 중앙 볼 스크류 지지대는 두께를 기본 외형 프레임보다는 얇게 설계하여 최종적으로 제작을 하였고, 볼 스크류 구동에서 전류 센싱을 위한 칸막이를 제작하여, 볼 스크류가 자동적으로 양쪽 바퀴 축 중심에 와서 멈출 수 있도록 하였고, 볼 스크류가 회전시에 마찰을 줄이기 위하여 양쪽 끝 프레임에는 베어링을 넣을 수 있는 공간과 차후 초음파 센서를 넣을 수 있는 부분을 제작하였습니다. – 먼저 프레임 제작에 있어서 2차까지의 프레임 가공을 기본으로 하였고 3차에서 찾아낸 2차 프레임의 문제점들을 보정하기 위하여 중심부에 샤프트 고정부를 추가적으로 제작하게 되었으며 장애물 감지와 회피를 위하여 초음파 센서를 연결부에 장착하게 되었습니다. -초음파 고정부 양쪽에 대칭되게 하여 초음파를 고정하였고 상단부에 추가될 초음파 부분을 통해서 장애물 감지하거나 특정 행동을 할 수 있도록 하였습니다.
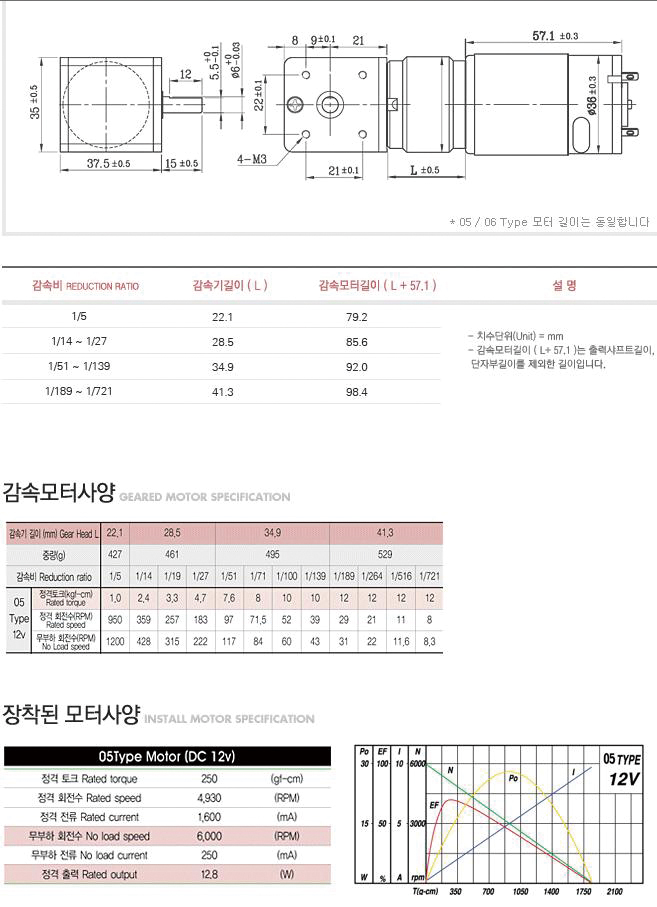
■ 조립 부품 스펙(IG32RGM-05TYPE 12V)
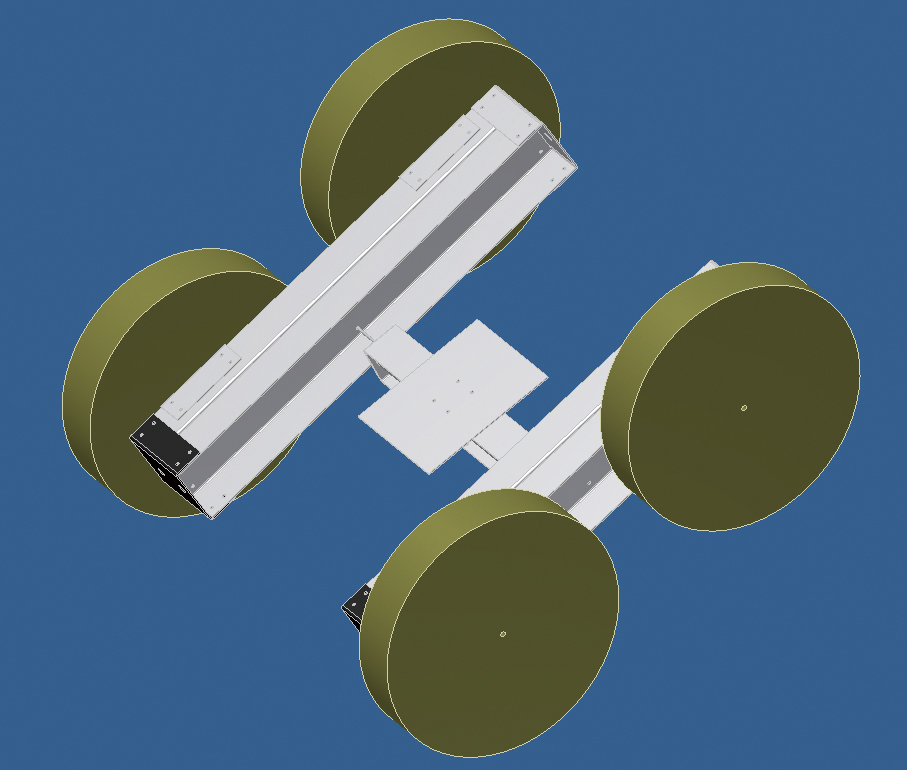
3) 볼 스크류를 이용한 이동 축 구성
하단부의 구동부와 상단부간의 원활한 움직임을 위해 볼 스크류를 부품으로 선정하였다.
볼 스크류의 선정에서 볼 스크류의 길이에 따라 로봇의 전체적인 크기가 결정됨으로 모터의 스펙과 함께 바퀴의 크기를 같이 선정 하는 작업을 하였으며 볼 스크류가 움직일 때 나타날 수 있는 문제점을 미리 예상해 봄으로써 설계 시 볼 스크류의 끝에 회전을 원활히 할 수 있는 베어링을 추가하였다. 또한 메인 모터 축을 고정시키는 부분에서 발생할 수 있는 문제점을 보완하기 위해 추가적인 고정 작업을 할 수 있도록 하단 구동부 프레임 중간에 레일 형식의 고정 부분을 추가하였습니다.
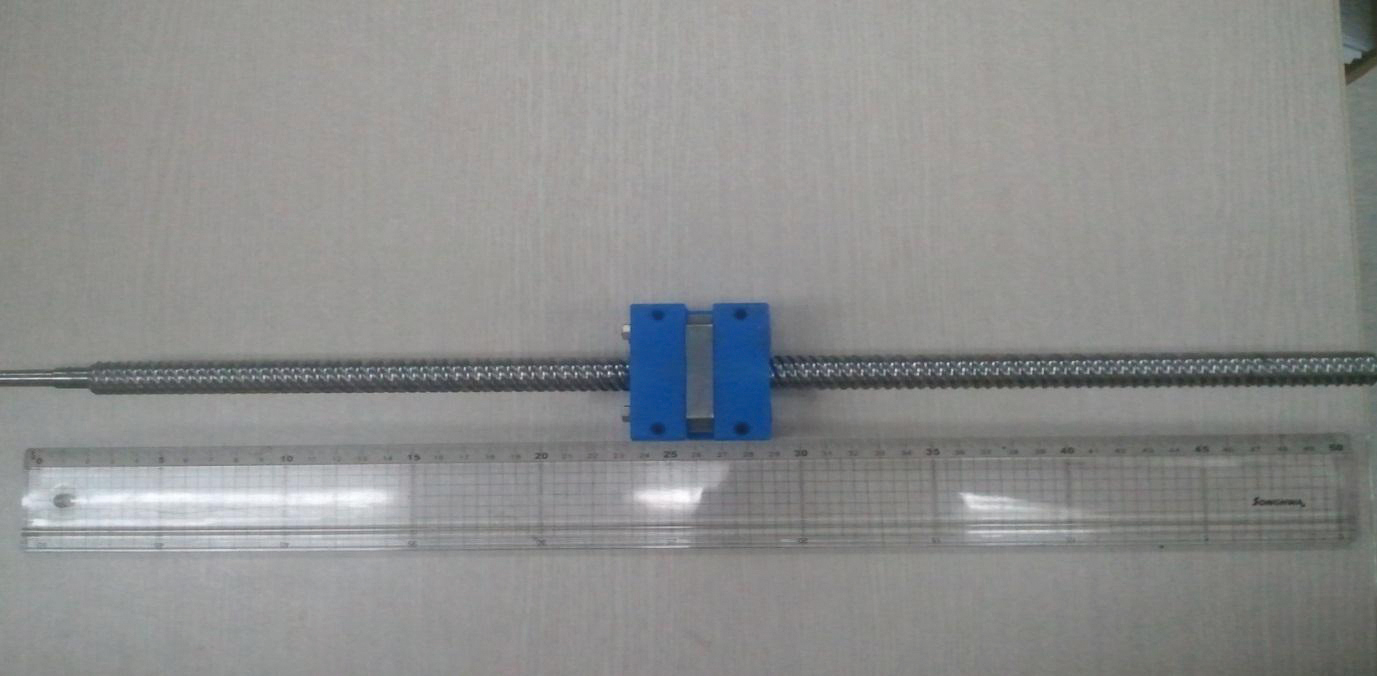
볼 스크류 : 모델명 SFER1616A2D-B
■바퀴 선정

무게를 줄이기 위해 고무, 우레탄, 철 재질의 바퀴 중 가벼운 소재인 플라스틱 재질의 바퀴 선정
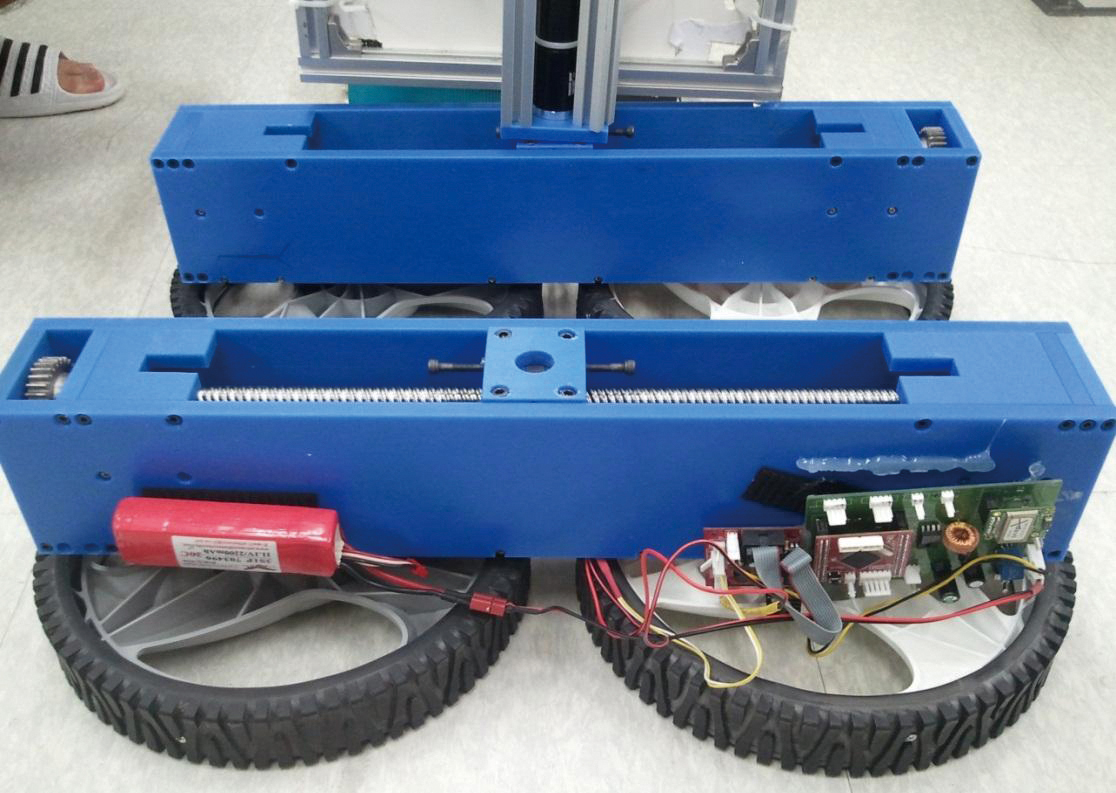
■ 하단부 구성
바퀴 구동부 축은 총 3개의 모터로 구성하였습니다. 바퀴 구동 모터는 IG-32RGM 05TYPE (12V/기어비 1/189)모터 두개(총4개)를 사용하여 구동 바퀴의 힘과 함께 저희가 원하는 스피드를 낼 수 있도록 구성하였습니다. 또한 볼 스크류 모터에는 RB-35GM 03TYPE(12V/ 1/100) 모터를 사용하여 그림과 같이, 일반 모터보다 샤프트의 위치가 한쪽으로 쏠린 특징을 살려 사용할 수 있도록 구성하여 바퀴 축 구성의 넓이가 커지는 것을 방지 하였습니다. 볼 스크류 회전을 방지 하기 위한 베어링을 양쪽에 총 4개를 사용하여 구성하고 볼 스크류는 고정할 수 있는 프레임을 제작하여 사각형의 프레임 안에 감싸는 형태로 구성 하였습니다.
 |
 |
로봇의 바퀴 구성은 저희가 무게를 고려하여 선정한 바퀴의 크기가 좀 더 커 바퀴 안쪽 내부를 좀 잘라내어 사용하고 고정 부분은 바퀴모터 샤프트와 바퀴와의 결합을 할 수 있는 부분은 제작하여 구성하였습니다.
 |
 |
2차 구동 축 구성에 있어 문제점이었던 이동 속도를 바꾸기 위하여 3차에서는 기어비를 바꾸어 속도를 확보하여 전체적인 구동부 프레임의 제작을 완료 하였습니다.
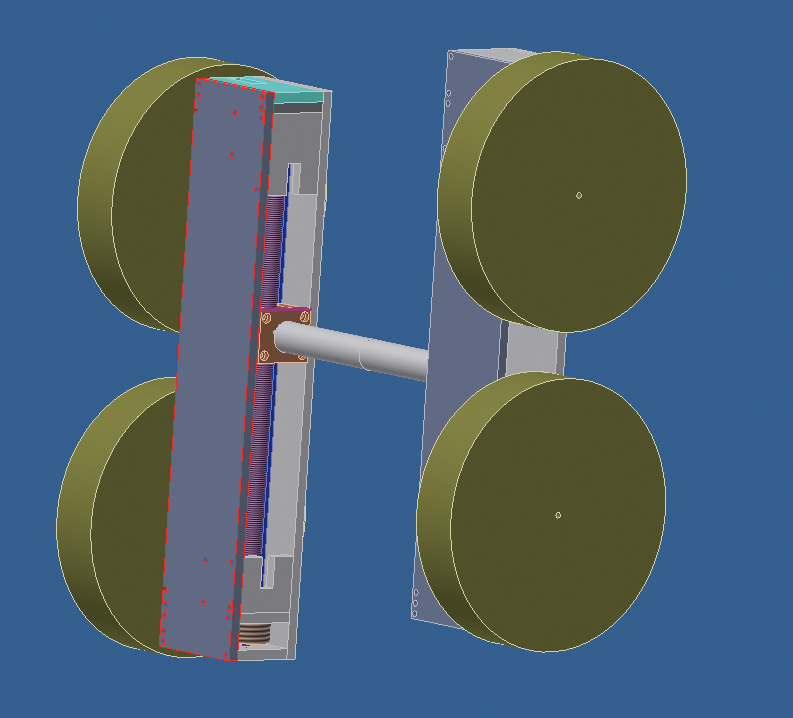
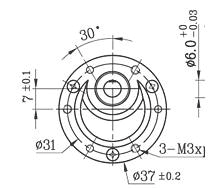
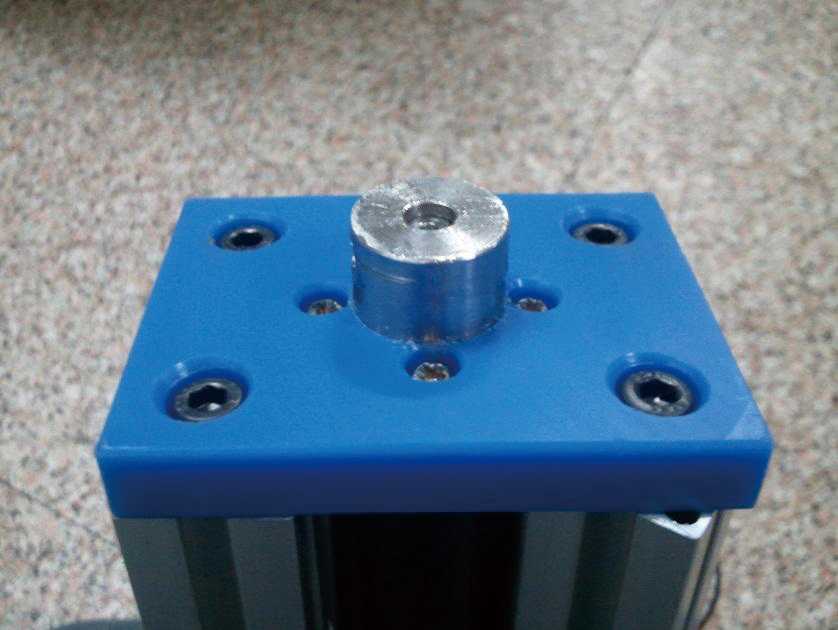
4) 로봇 메인 회전 축 구성
로봇의 메인 회전 축은 저희 팀이 가지고 있던 모터를 사용하였으며 맥슨사의 모터를 사용하였습니다.
맥슨 모터 두 개를 사용하여 프로파일을 이용 지지대를 만들고 모터의 샤프트를 좀 더 단단히 고정하는 부분을 함께 제작하고 바퀴축의 볼 스크류 부분과 결합하여 메인 축을 구성하여 모터의 회전을 통해 바퀴 축을 회전 시킬 수 있도록 하였습니다.
 |
 |
 |
 |
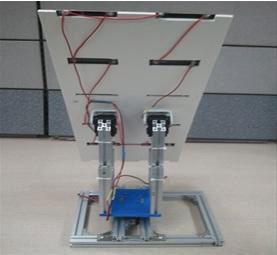
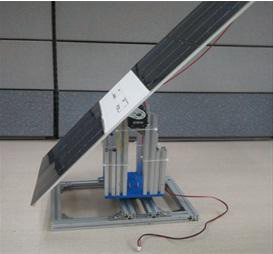
5) 상단부 제작
상단부를 솔라셀을 이용한 태양광 충전시스템 구성 목표로 제작을 진행하였습니다. 그리하여 현재 서보모터 3개와 Cds센서, 솔라셀 판넬을 이용하여 태양광 충전시스템을 구성하였습니다.
 |
 |
 |
 |
- 트랙커 회로구성
트랙커 구동 회로
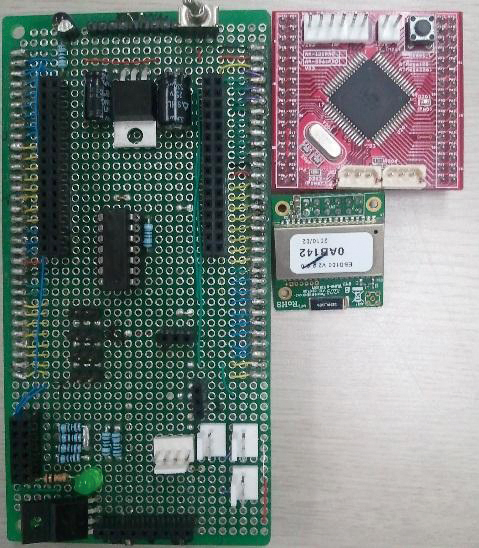
6) 구동부 제작 및 회로 구성
■ 바퀴 축 구성
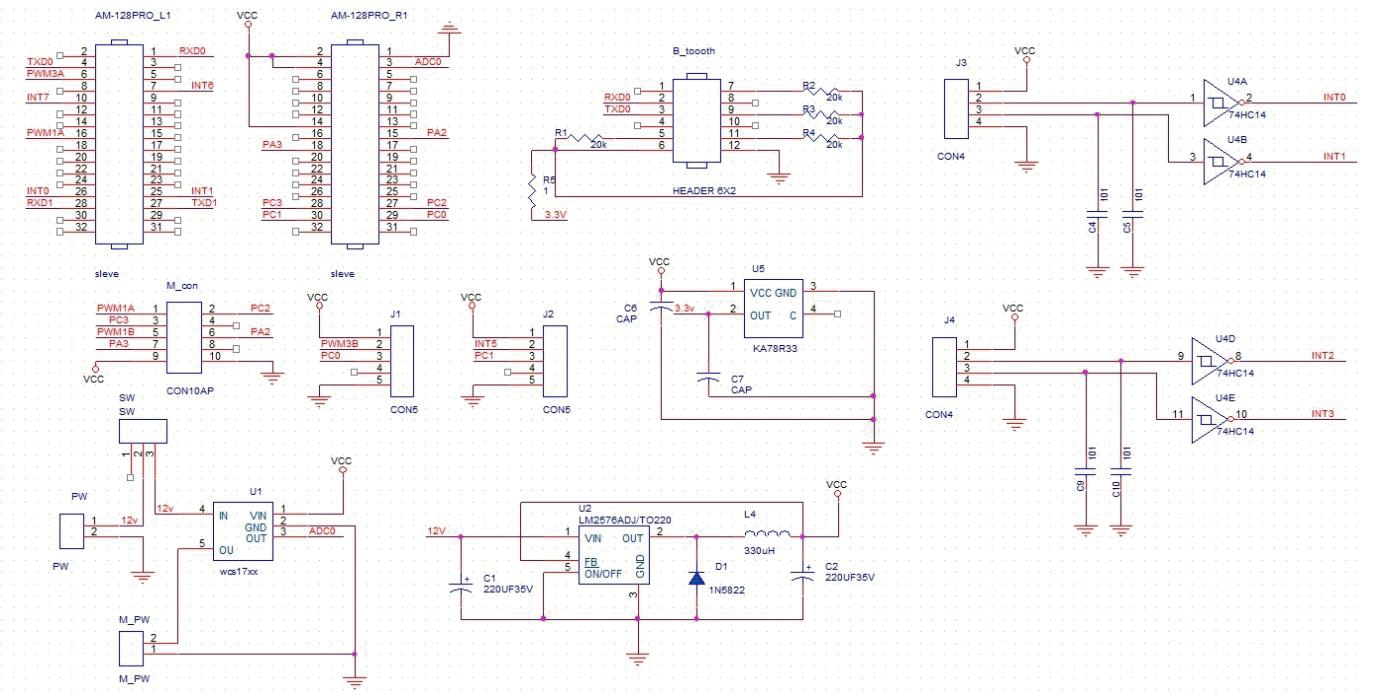
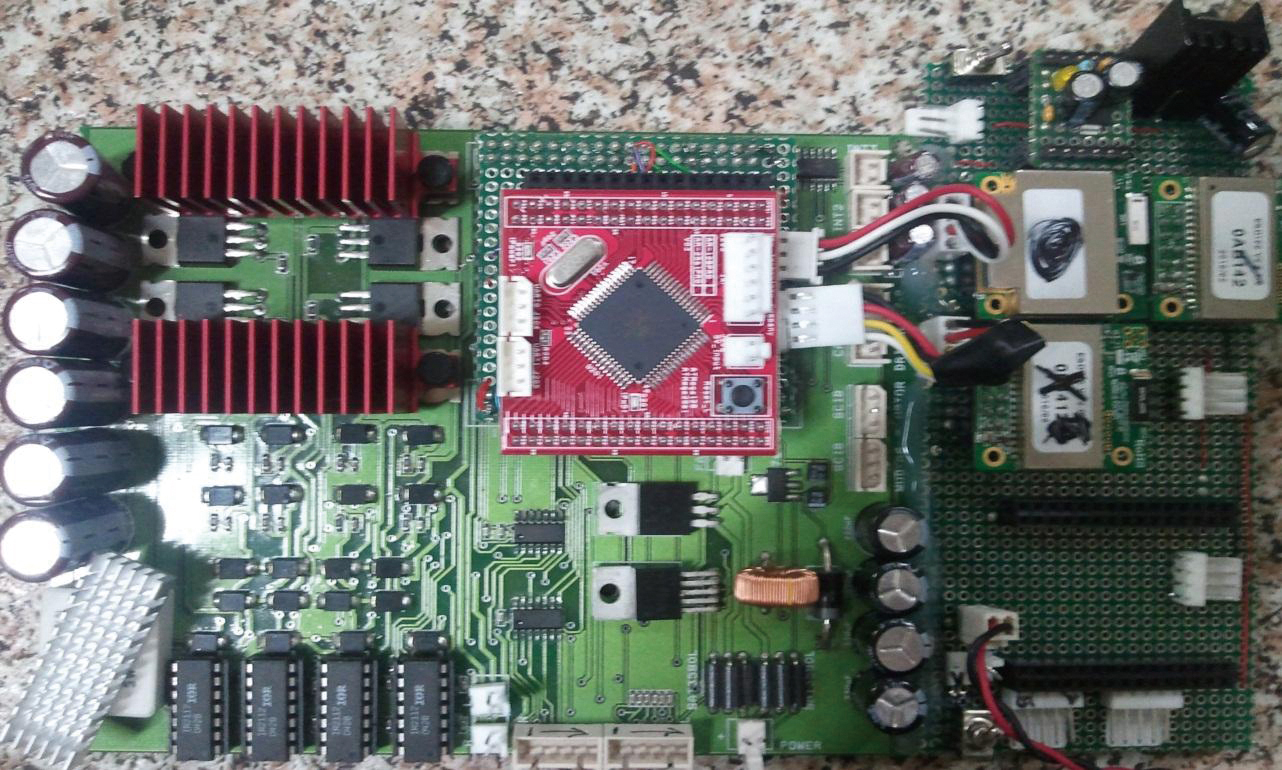
바퀴 축 구성회로

바퀴 축 회로 구성은 무선 통신을 이용한 Bluetooth와 컨트롤러, 모터드라이브, 거리를 감지할 수 있는 초음파센서나 적외선 센서, 엔코더의 값을 정확하게 가져 올 수 있는 슈미트트리거 IC칩 전류센싱을 위한 전류센서로 구성 되어져 있다. 여기서 모터 드라이브를 하나만 사용하기 위해 2채널 모터에서 같은 신호로 바퀴 모터를 작동하게 되며 나머지 하나로 볼스크류의 모터를 제어하였습니다.
다음과 같은 구성품으로 회로를 구성하였으며 현재 PCB 납땜을 완료한 상태이지만 PCB제작을 처음 해봄으로써 어느 정도 실패를 하였고 이것을 보안 하기 위해 현재 제작 되어진 PCB보다 크기를 줄여 바퀴 프레임 밖으로 나와있는 회로와 배터리를 프레임 안으로 넣어 외관상 좀 더 깔끔하게 보이도록 하려고 제작을 진행하였습니다. 그 결과 현재는 회로 자체를 로봇 바퀴 구동 프레임 안에 넣음으로써 좀 더 완벽하게 회로 구성을 완료 하였습니다. 그리고 칸막이 프레임에 맞추어 볼 스크류가 정지하게 되면 걸리는 모터의 과부하 시 측정되는 전류센서의 값을 ADC하여 볼스크류의 양쪽이 같은 속도로 움직이지 못하더라도 같은 자리에서 자동적으로 먼저 도착한 모터를 세워서 다음 모터를 끝까지 진행 시켜 멈추도록 하고 통신 딜레이와 각각의 볼 스크류 모터의 회전이 틀려지는 예외 상황을 제거 하도록 하였습니다.
■ 메인 축 구성
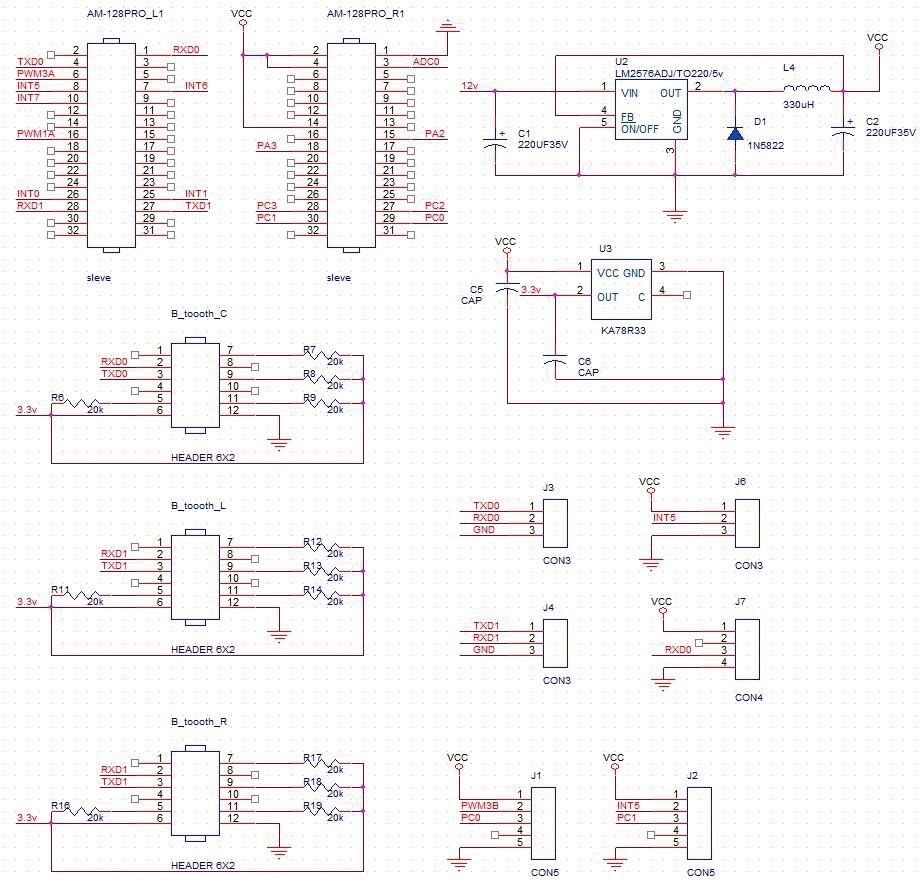
메인 축 구성 회로
메인 축 회로구성은 기존 동아리방에서 제작했던 맥슨 모터를 돌리기 위한 모터드라이버를 사용하며 PC와 바퀴 축간의 무선통신을 위한 블루투스 모듈과 각종 센서를 컨트롤 하는 컨넥터 부분으로 이루어져 있습니다. 현재 메인축 구성은 100% 진행 상태가 아니며 차후 솔라셀을 위한 컨트롤 부분과 추가될 사항에 따라 변동 될 것으로 보고 있습니다.
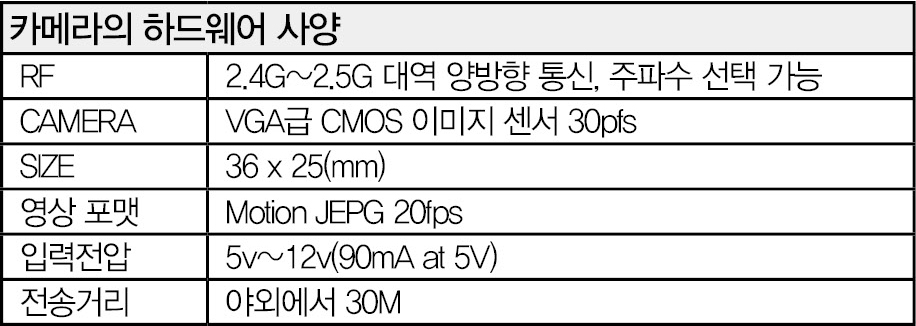
7) 카메라 모듈 선정
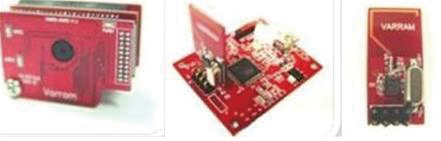
DRC 카메라 모듈
영상의 송신과 수신이 원활하며 동시에 로봇에게 명령을 줄 수 있는 양방향 통신이 가능한 신개념의 양방향 무선 영상 전송 DRC(Diplex Radio Camera)카메라를 사용하였다. 로봇 비전 응용을 위해 양방향 통신이 가능하도록 설계되어 컴퓨터에서 DRC로 필요한 데이터를 송신할 수 있다. 따라서 카메라는 수신 받은 데이터를 시리얼 통신으로 사용자의 제어기로 전송할 수 있다.
 |
 |
이러한 모듈사용을 통해서 영상은 전송하며 전송된 영상을 PC를 통해 확인 할 수 있고 또한 상황에 따라서 바로 로봇에게 명령을 내릴 수 있도록 구성하려 한다. 또한 PC로 받은 영상은 다른 영상처리 과정을 통해서 다른 방향으로도 활용이 가능한 카메라를 선정 하였다.
8) PC컨트롤 및 카메라 부분 제작
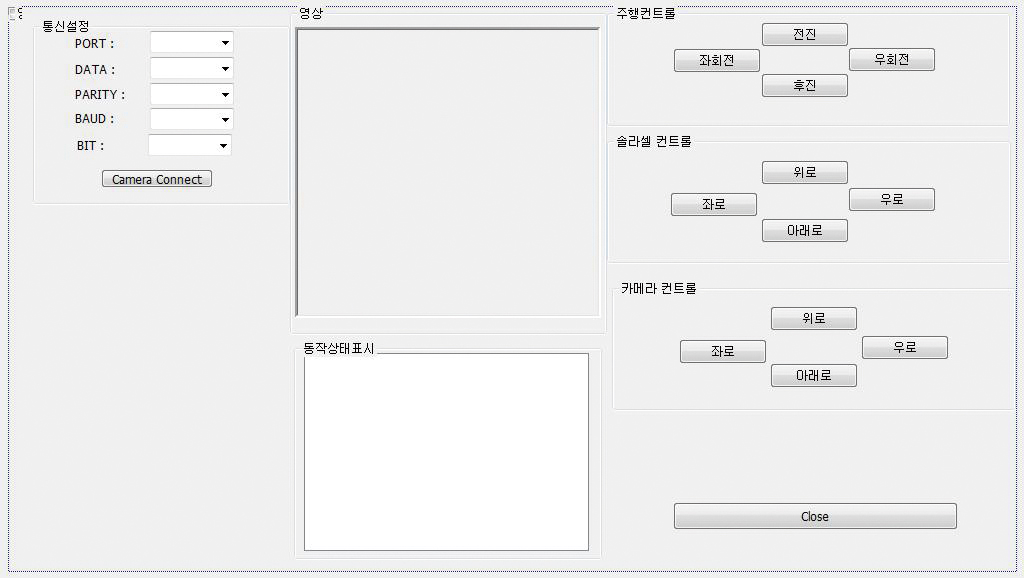
■ 기존 계획된 카메라 컨트롤 UI 설계
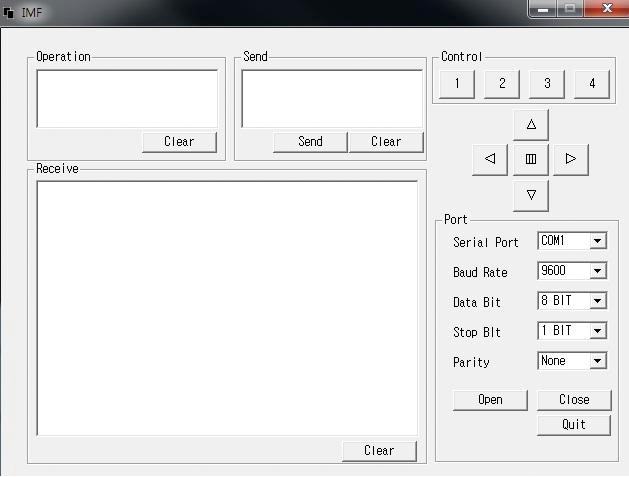
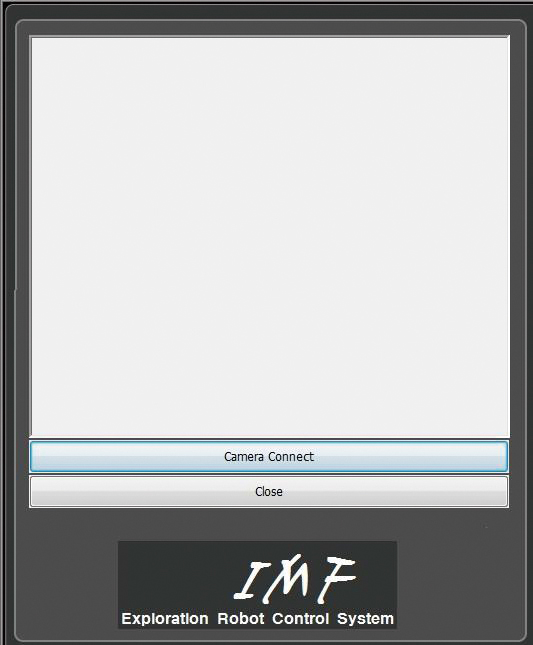
■ 변경된 UI제작 결과
 |
 |
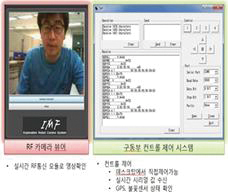 |
기존에 구상된 UI버리고 좀더 깔끔한 UI를 구성하도록 노력하였으며, Control 모드를 통해서 로봇의 움직임을 제어 하고 로봇의 상태를 Receive 받을 수 있도록 구성을 하였습니다.
9) 충전회로 구성
■ 충천회로 구성
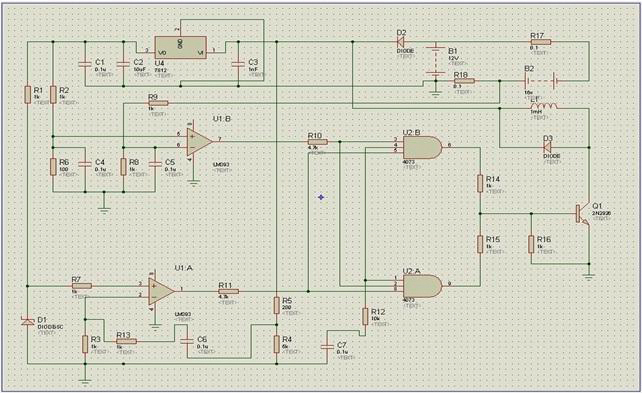
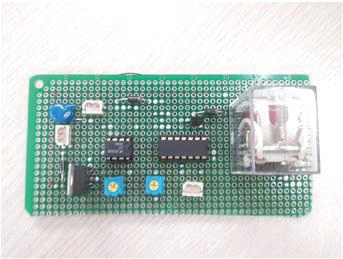
충전회로 제작
10) 전체완성도
현재까지 진행된 결과로는 상단부에 대한 트랙커 제작을 통해 상단부를 구성하였고 차후 나머지 시간에 바퀴 축 구동부의 회로를 바퀴 축 프레임 안으로 넣어서 로봇을 구성하여 완성도를 높이고 로봇 컨트롤 부분에 좀 더 신경을 쓰려고 구상 중에 있습니다.
 |
 |
 |
11) 후기
처음 구상하였던 작품에 여러가지 문제점이 있어 외형이나 몇가지 부분을 변경하여, 목표와 동일한 작동이 불안정한 점. 100% 만족스러운 완성을 하지 못한 점에 대하여 매우 아쉽게 생각하며 본 작품 설명을 마치겠습니다.
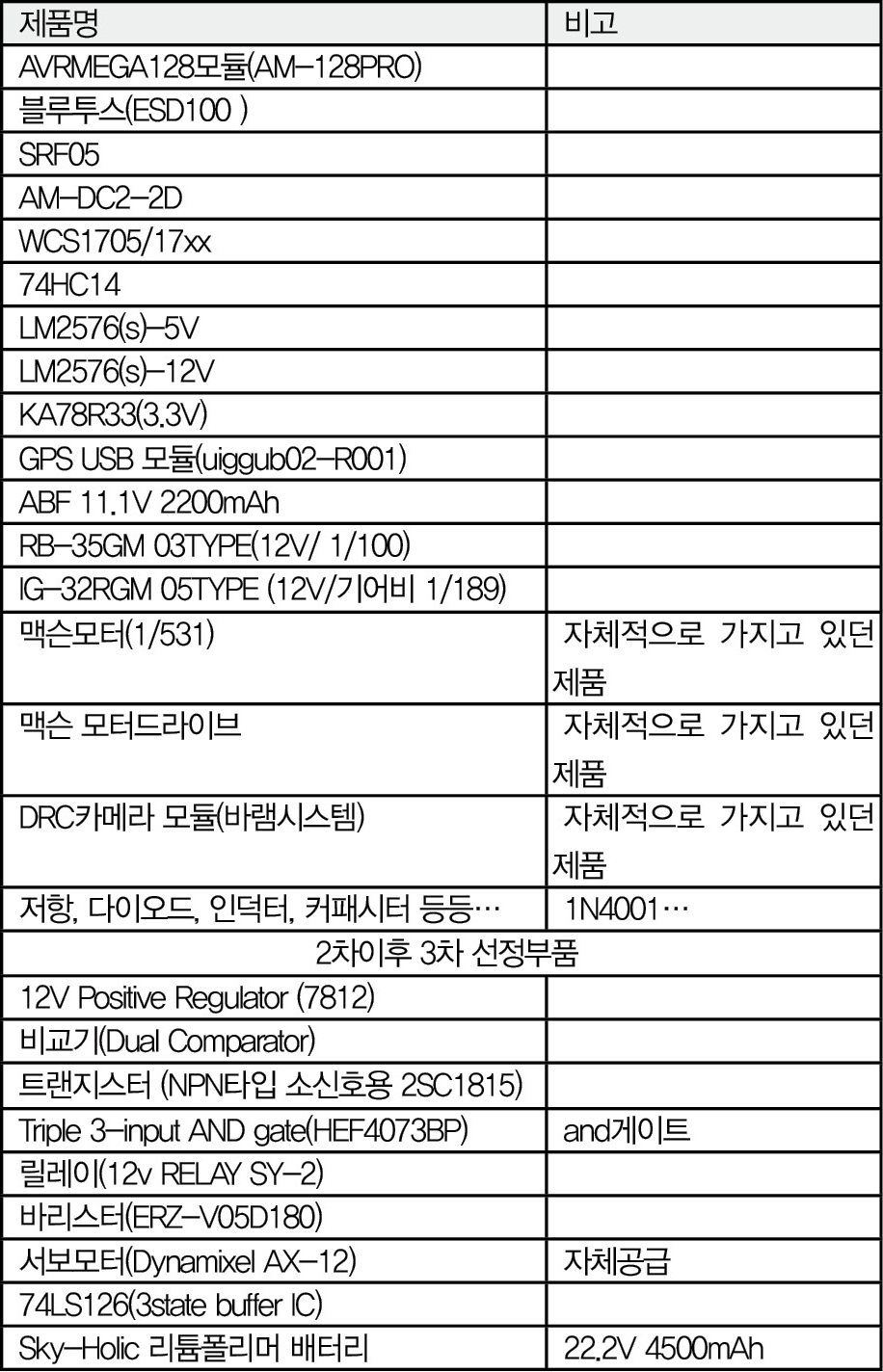
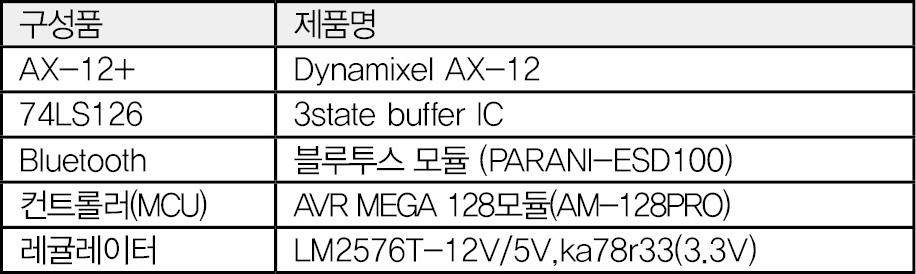
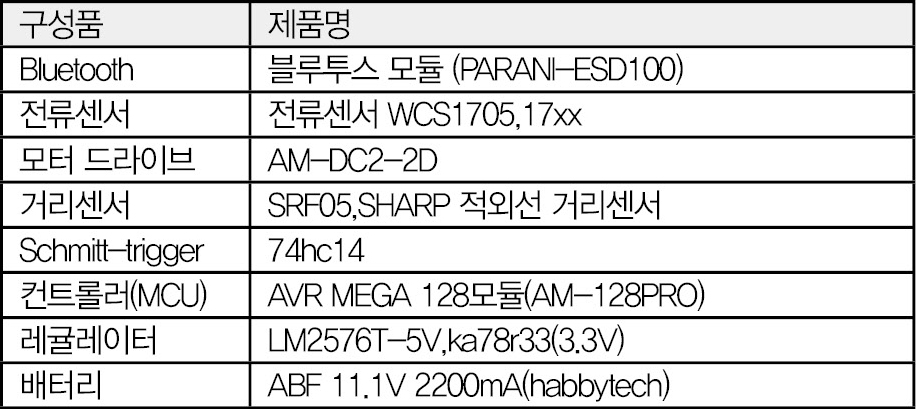
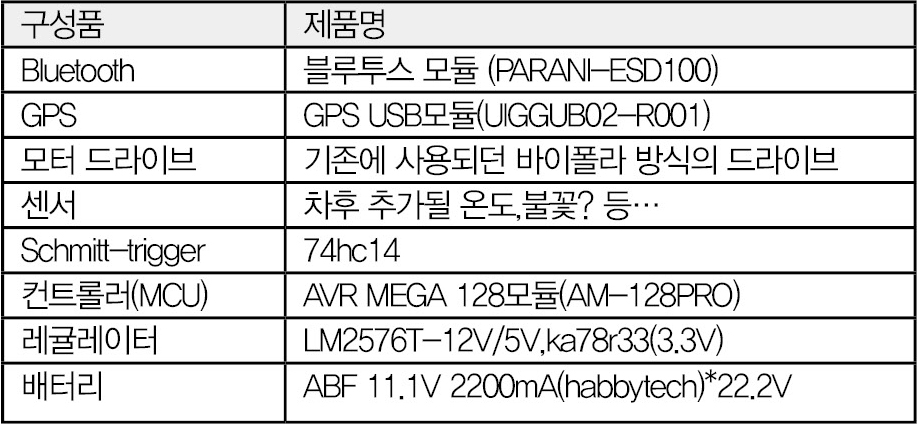
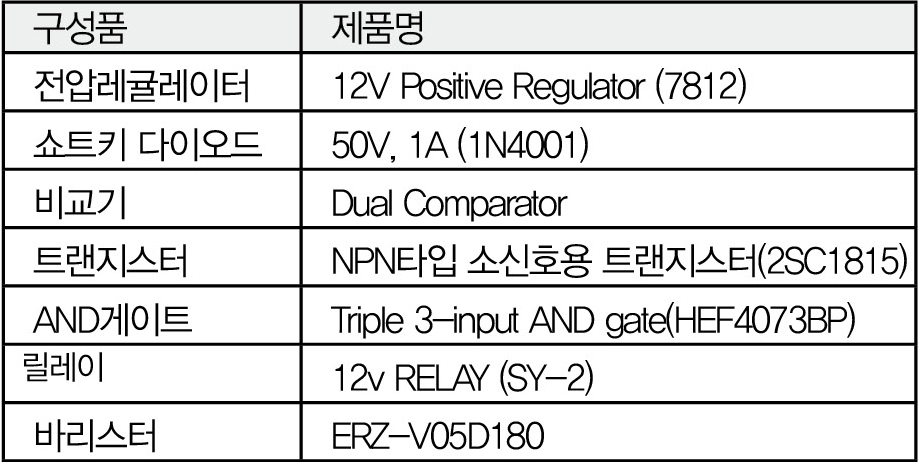
6. 부품선정