DC 모터 구동에 필요한 드라이버 제품군
저희 연구소에서 기존에 판매하고 있던 DC 모터 드라이버 제품군을 알려드릴려고 합니다. 본 제품의 기획의도는 합리적인 가격에 고급제어기가 꼭 필요하지 않으신 분들께 드리는 솔루션이었습니다.
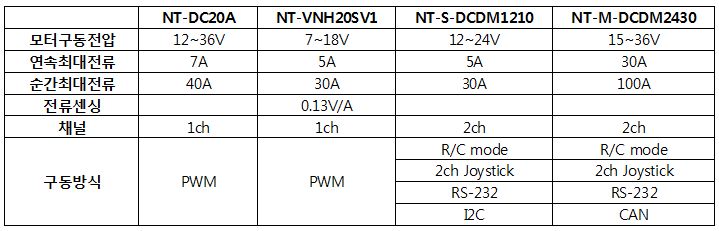
본 DC 모터 시리즈는 총 4종으로 위에 보시듯이 7V부터 36V까지 구동 전압에서 최대연속전류 30A급 모터 드라이버까지 포함되어 있습니다. 단순히 PWM과 방향신호를 통해 모터를 구동하는 1ch짜리 드라이버부터, RC / Joystick, I2C나 CAN통신을 통해 명령을 내릴 수 있는 모델까지 있습니다. 구동자체에 목적이 있으면서, 속도나 토크, 위치제어등 고가의 성능이 필요치 않은 분들께서 꽤 유용할 거라고 생각합니다.

본 모델은 아주 심플한 기능에 딱 맞는 크기를 가진 제품입니다.
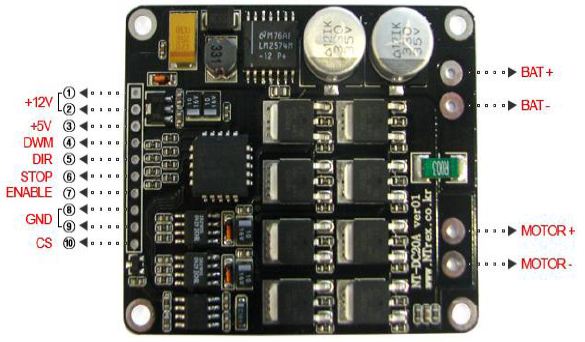
위 그림의 핀맵처럼 방향신호와 PWM신호를 가지고 하나의 모터를 구동하는 드라이버입니다. 원칩형 드라이버들이 가지지 못하는 높은 구동전압과 구동전류를 소화할 수 있습니다.
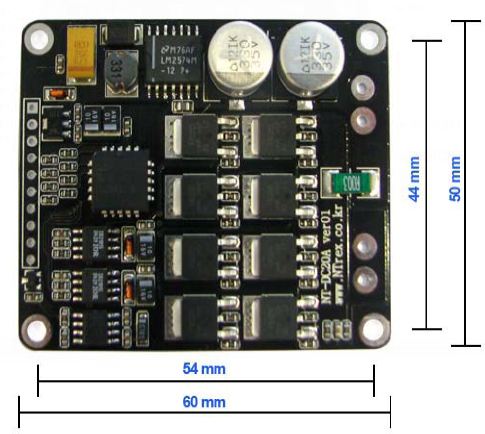
특히 사이즈도 소형이어서 작은 주행로봇을 자작하실때 꽤 유용할 것입니다.
제품 메뉴얼 다운받기 MW-VDC24D200S DC Motor Driver Quick reference Manual
본 모델은 위의 NT-20A보다도 더 작은 크기의 드라이버입니다.


그림처럼 작은 크기에 스택으로 쌓아서 사용하셔도 무방한 모델이 되겠습니다.
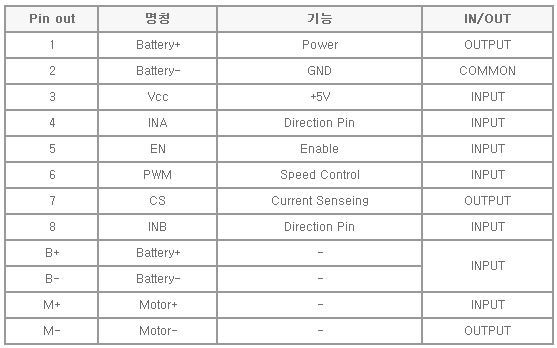
핀맵에도 나타나 있듯이 방향신호와 PWM신호를 이용해서 구동하게 됩니다.
제품메뉴얼 다운받기 nt-vnh20sv1

본 모델은 두 개의 모터를 구동할 수 있는 모델입니다.
조이스틱과 RC조종기를 세팅할 수 있으며, 시리얼통신을 통해 모터를 구동시킬 수 있습니다. 그러면서 연속 구동 5A에 가장 많이 사용되는 전압범위인 12~24V를 입력전원으로 사용하고 있습니다. 두 개의 모터를 돌릴 수 있는 2ch짜리 이므로, 이 드라이버 하나로 소형 주행로봇은 충분히 만들어 보실 수 있습니다.
제품 메뉴얼 다운받기 NT-S-DCDM1210 User’s Manual Ver1.00

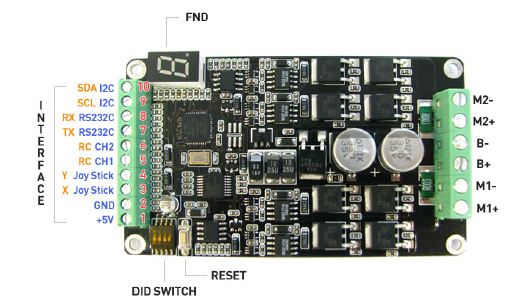
두 개의 모터를 구동할 수 있는 DC드라이버이면서 한 채널당 30A까지 구동되는 고용량 드라이버입니다.
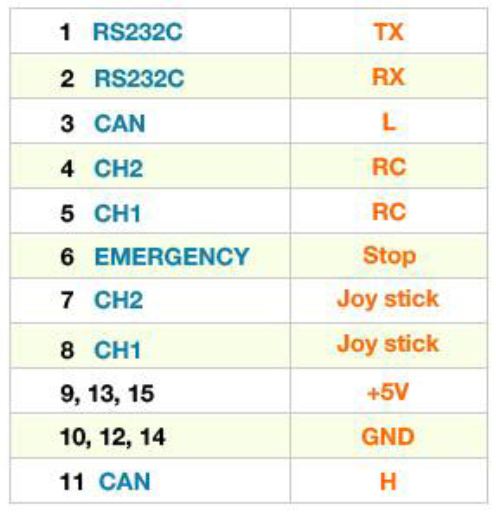
1210모델처럼 RC와 조이스틱에 대해 대응하면서, CAN과 RS232를 지원합니다.
아마 국내에서 이 정도 고용량 드라이버를 이 정도 가격에서 만나보시기는 꽤 힘들겁니다.
제품메뉴얼 다운받기 NT-M-DCDM2430 User’s Manual Rev1.02


