

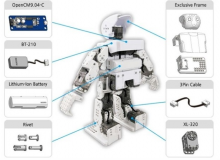
[45호] Sparkfun 마이크로비트 호환 로봇 키트 출시
디바이스마트 매거진 45호 | 일반적으로 아이들에게 장난감을 활용하여 과학과 공학에 관심을 갖도록 하는 방법은 널리 쓰이고 있다. 특히 로봇 키트는 간단하지만 어린이, 청소년들이 제작 및 코드 작성 방법을 익히도록 하는 데에 도움이 된다.

[37호]아두이노를 활용한 밸런싱 로봇 키트 개발·출시
디바이스마트 매거진 37호 | 최근 해외의 코딩 교육 열기가 뜨거워짐에 따라, 우리나라도 2018년부터는 소프트웨어 교육이 의무화되어 초/중/고등학교에서 코딩 교육이 정규 과목으로 편성될 예정이다.
실외 산악형 주행 로봇 AstroBoyS 테스트
Astroboys 제품을 실외 험준한 지형에서 테스트 영상입니다^^
대형의 강력한 주행 성능을 가진 AstroBoyS의 6WD구동형 모델로
주행성능이 아주 우수합니다.
기본적으로 RC 조종기로 구동하도록 되어 있습니다.
YTN 새 프로그램 “Let’s Make” – 3D 프린터와 로봇을 접목하다
NTREX RexBot3D 입니다.
2015.06.14 (일)
YTN에서 방영될 예정인 신규 프로그램 Let’s Make 에
RexBot3D가 촬영을 했습니다!
Pololu 공식 Distributor 디바이스마트, Pololu 상품 판매 개시!!
안녕하세요, 디바이스마트입니다.
드디어 디바이스마트에서도, Pololu의 제품을 만나보실 수 있게 되었습니다.^^
Pololu의 공식 Distributor 디바이스마트!!
직구로 인한 높은 배송비/통관절차/관세 등의 복잡함을 버리고,
이제 디바이스마트를 통해 pololu의 다양한 상품을 쉽고 편하게, 빠르고 저렴하게 구매하세요!
편리하게, 저렴하게 구매하세요^^
http://www.devicemart.co.kr/goods/brand.php?seq=1748
공식 Distributor 안내페이지
https://www.pololu.com/distributors#korea

2014 로보월드
2014년 10월 22일 부터 25일까지 일산 킨텍스에서 진행된 로보월드는 어느덧 9년 차로 접어들었다.
2006년 시작된 로보월드는 국가 로봇산업 발전 전략의 일환으로 국내 모든 로봇 전시회, 경진대회, 컨터런스가 통합한 국제적 규모의 전시회이다.
올해는 150개사 450부스로 매년 전시규모가 커지고 있다. 또한 초기 산업로봇 중심의 전시회였다면 올해에는 산업로봇과 서비스용 로봇, 로봇컨테츠의 활성화가 되어 보는이들의 눈을 사로 잡았다.
킨텍스 제1전시관 4-5홀에서 대규모로 진행되었으며 지역별로 카테고리를 두어 전시되었다.
입장과 동시에 가장먼저 눈에 들어온 로봇은 산업용 로봇이다.
전시회장에 입장시 제일 앞에 있고 제일 눈에 띄는 현대의 산업용 로봇. 그동안 대기업이 많은 산업용 로봇을 전시해 왔으나 올해는 현대중공업의 마지막 남은 대기업 산업용 로봇이었다.
현대중공업의 의료 로봇. 서울아산병원과 현대중공업이 개발했으며 복부와 흉부에 있는 인체기관의 암검사…

RC 조종기로 2축 모바일 로봇 구동하기
이번에는 MoonWalker를 이용해서 2축 구동형 모바일로봇을 동작시는 동영상강의를 진행할려고합니다.
이번에 예제로 삼을 대상은 저희가 판매하고 있는 STELLA입니다. [바로가기]
STELLA는 두 개의 모터가 있고 앞에 무게 지지용 바퀴가 있습니다. MoonWalker MW-MDC24D200D 모델을 가지고 이와 같은 모바일로봇을 구동할 수 있습니다.
먼저 두개의 모터를 연결하시고, 또 각 채널에 맞게 엔코더를 연결하시면 됩니다. 이때 엔코더 연결방향이 올바른지 확인하는 작업은 필수있습니다. 그 방법은 첫 번째 동영상 강의에서 언급했었습니다.[바로가기] 혹시 보지 않으셨다면 꼭 확인하세요.
이제 이전의 RC 조종기와 간편하게 연결하기[바로가기]대로 따라하시면 기대했던 것과는 달리 한 쪽 바퀴만 돈다든지 하는 상황이 생깁니다. 이제부터 세팅해야죠^^
먼저 Control UI Program[바로가기]을 실행하시고, 연결한 다음, Configuration 탭에서 Joystick/RC Control and Safety 항목에서 Control Mixing 항목에서 Mixing…

2013년 계룡대 벤쳐 국방 마트 전시회를 다녀왔습니다.
지난번 국군의날에 계룡대에서 개최된 지상군 페스티벌의 일환으로 벤쳐 국방 마트 전시회를 저희 연구소도 참가했습니다. 다양한 국방관련 장비들을 볼 수 있었으며 저희 제품에도 많은 분들이 호응을 해 주셨습니다.
저희는 위에 보이는 세개의 제품을 출시 했구요. 최근에 뉴스에도 나온[바로가기] 그 로봇들이랍니다.^^
벤쳐국방마트에는 다양하고 많은 제품들이 출시되어 있었는데요
이런 전투용 군복이나
이렇게 각도에 따라 투과비율이 달라지는 필름
아예 군 작전용 차량까지도 전시가 되었습니다.
이 제품은 태양광 충전식 장비들인데요. 좀더 많은 전력을 사용할 수 있도록 고안되었고 국 작전에 맞도록 설계되었다고 하더군요
이건 다용도 케이스(펠리칸)인데요. 저희도 출품작이 이런 케이스를 필요로 해서 살짝 관심있게 구경했답니다.
이 제품은 3D 정찰용 장비라고 하더군요. 위에 있는 차량에 레이더를 달고 시연하고 있더라구요.
이렇게 좋은 제품들이 전시되는…


