2013 대전 사이언스 페스티벌



지난 8월 9일부터 11일까지 3일간, 대전 광역시에서 대전엑스포 20주년을 맞아 2013 대전 사이언스 페스티벌이
“응답하라 1993 상상하라 2033″ 이라는 타이틀로 개최되었다.
이 축제는 과학기술도시로서의 도시브랜드를 제고하고, 대전의 대표축제로 자리잡길 바라는 염원을 담아
대전광역시, 미래창조과학부, 한국과학창의재단, 한국관광공사가 후원하고 대전마케팅공사의 주최로 열리게 되었다.

우선 디바이스마트가 협찬을 했던 융합 과학 창작 경진대회의 현장을 찾아갔다.
융합 과학 창작 경진대회는 오픈하드웨어 ‘아두이노’를 활용한 융합과학(STEAM) 시나리오 구현 대회로, 대학부와
청소년부로 나뉘어 이틀간 열렸는데, 이날은 청소년부 대회가 열리고 있었다. 작품 발표를 위한 무대와 그 앞쪽으로
심사위원들이 자리 잡고 있었고, 발표순서를 기다리는 참가자들과 일반인들에게도 참관이 오픈되어 있었다.
정확한 작품의 내용은 이해할 수 없었지만, 대회를 위해 많은 준비를 한 참가자의 열정은 느낄 수 있었다.

융합 과학 창작 경진대회의 바로 옆 공간에는 지능형 soc 로봇워 경진대회가 준비중이었다.
많은 참가자들이 대회 시작전 자신의 로봇들의 동작을 점검중인 모습이다.
SoC(System on Chip)를 활용한 지능형 로봇 구현을 통해 SoC 분야의 고급 기술인력 양성과 함께, 차세대 성장동력 사업인 IT-SoC, 지능형 Robot 분야의 활성화를 통한 국가 경쟁력 발전의 초석을 마련하기 위해 지난 2002년 11월 아시아-태평양 SoC 기술대전(AP-SoC 2002)에서 처음으로 개최되었으며 각자의 창작로봇이 아닌, 지정되어있는 로봇으로 1:1 태권도 대련과 미션 수행경기등을 하는 대회이다.

옆공간에서는 대전지역 대학교들의 로봇/메카트로닉스 제품 전시회가 열리고 있었다.
직접 제작한 각종 로봇들을 출품하여 전시하고 있었는데, 목원대학교에서 출품한 계단 청소 로봇이 가장 인상적이었다.
디바이스마트에서 구입한 트랙바퀴를 이용하여 계단을 오르내리며 청소하는 로봇을 만든것인데,
상용화를 시킬 수 있을 정도의 수준은 아니었으나 아이디어와 노력 만큼은 높이 살만했다.
그밖에 요즘은 많이 보급화된 쿼드콥터와, 소형 메카넘휠을 이용한 주행로봇들도 볼 수 있었다.

다음으로 찾아간 곳은 “2013 국제과학기술교구 산업전” 의 일환인 상상과학아카데미 체험전이다.
말그대로 아이들의 과학적 상상력을 키워주기 위한 만들기 배움터였는데, 매우 진지한 표정으로 참여하는 아이들과
함께 온 부모들의 자상한 모습이 참 보기 좋았다.
부모들의 자상한 마음만큼 아이들의 상상력도 무럭무럭 자라날 것이다.

상상과학아카데미 체험전의 옆공간에서는 과학교재들을 전시, 판매하고 있었다.
간단한 선이나 블록형태의 조각들을 여러개 이어 붙여서 로봇이나 각종 입체도형들을 만드는 교재들이 주를 이루었다.

다음은 야외 행사장의 모습인데, 33도가 넘는 폭염에도 불구하고 많은 사람들이 행사장을 찾았다.
행사장 입구를 들어서면 과학의 도시답게 ”대전을 빛낸 과학자의 거리”라는 타이틀로 대전 과학 분야 주요 인사들의
프로필과 분야별 연구성과등이 적힌 입간판들이 줄지어 전시되어 있었다.

행사장 한편에는 셰계의 유명한 과학자들을 조각물로 꾸며 놓고 인물의 활동기간과 업적등에 대해서도 설명이
적혀 있었으니, 이것 역시 아이들의 과학공부에 큰 도움이 될 수 있을것이다.
고대 그리스에서 가장 위대한 수학자ㆍ물리학자로서 아르키메데스의 원리를 발견하고 고대 수학을 발전시킨 인물.
목욕탕에서 물이 넘치는것을 통해 부력의 원리를 발견하고 뛰쳐나오는 모습을 조각상으로 표현해 놓았다.
우리가 흔히 “퀴리부인” 이라 부르고 있는 프랑스의 물리학자·화학자. 남편과 함께 방사능 연구를 하여 최초의 방사성 원소 폴로늄과 라듐을 발견하였으며, 이 발견으로 방사성 물질에 대한 학계의 관심을 불러일으켜, 새 방사성 원소를 탐구하는 계기를 만든 인물.

야외 행사장은 거의 대부분이 시민참여행사인 “사이언스 스쿨”로 이루어져 있었다.
사이언스 스쿨존은 대전지역 초·중·고등학교의 과학분야 교사들과 각급 과학영재반 학생들이 운영하는 프로그램으로
사고력과 창의력을 자극하는 프로그램 체험 후, 참가자가 만든 성과물은 여름방학 과학분야 과제물로 제출할 수 있다.

사이언스 스쿨의 프로그램중 하나인 삼각플라스크에 풍선넣기 실험을 배우고 있는 아이들의 모습.
이 실험은 압력이 일정할 때 기체의 부피는 종류에 관계없이 온도가 1℃ 올라갈 때마다 0℃일 때 부피의 1/273씩
증가한다는 샤를의법칙을 간단하게 알아볼 수 있는 실험이다. 원래는 중학교 과정에서 배우는 것으로 알고 있는데,
아직 초등학생인 아이들에게는 매우 신기한 실험임을 아이들의 진지한 표정에서 바로 알 수 있었다.

사이언스 스쿨존과 함께 야외 행사장에 마련된 에너지 체험존. 자전거 발전기를 통해 아이들이 직접 에너지를
만들어 앞에 놓여있는 공을 공중에 띄우는 체험을 하고 있다.

역시 같은 야외행사장에서 열린 특별프로그램 ”제3회 대전발명경진대회 수상작 전시회”
생활속에서 떠오른 참신한 아이디어들을 엿볼 수 있었다.

야외행사장을 한바퀴 돌아 도착한 곳은 엑스포 과학공원의 첨단과학관. 이곳은 이번 축제에서는 “대덕특구홍보관”
으로 꾸며져 있었는데, 대덕 특구의 역사와 소개 및 17개 정부산하 연구소들의 홍보부스까지 깔끔하게 조성되어 있었다.

마지막으로 들른 곳은 대덕특구홍보관내의 한국항공우주연구원 홍보부스.
올해 드디어 발사에 성공한 나로호의 모형이 세워져 있었다. 나로호는 한국 기술로 제작한 위성을 탑재하여
지구 궤도에 올려 놓는 임무를 수행하기 위해 개발한 한국형 우주발사체로서, 몇차례 실패와 시행착오를 겪었지만
포기하지않고 결국 발사에 성공하여 우리나라의 해외 인지도 및 선호도, 수출 증가 등 전반적인 부문에서 긍정적인
효과를 가져오고 있다.

그밖에도 수소연료 전지차, 전기 자동차, 하이브리드 자동차 등 관람객의 탑승체험이 가능한 다양한 창작 자동차 전시회인
“상상모터쇼”, 감성과학과 첨단과학의 만남인 “로봇스토리” 등의 과학행사들과 ”하나 자연사랑 푸른음악회”, “거리의 예술가”
등의 다채로운 문화행사까지 더 많은 연계 프로그램들이 있었지만 전부 다 둘러보지 못한것이 아쉬웠다.
정말 대전의 대표적인 관광문화축제가 될것이 분명해 보였으며, 내년이 더욱더 기대되는 대규모의 실속있는 축제였다.
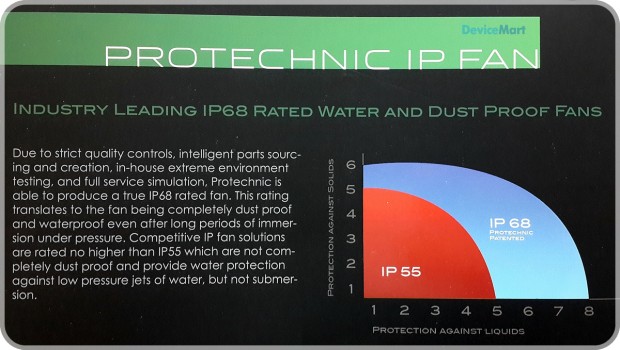
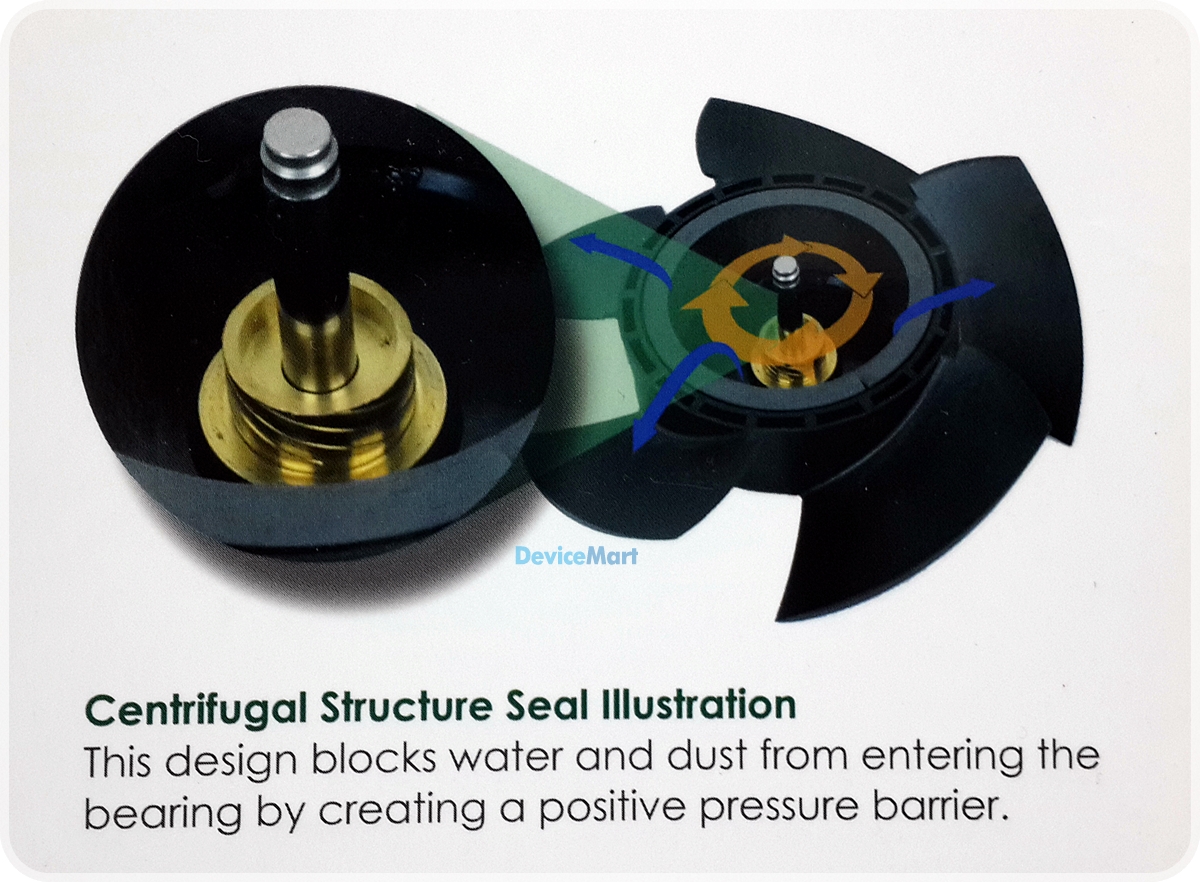
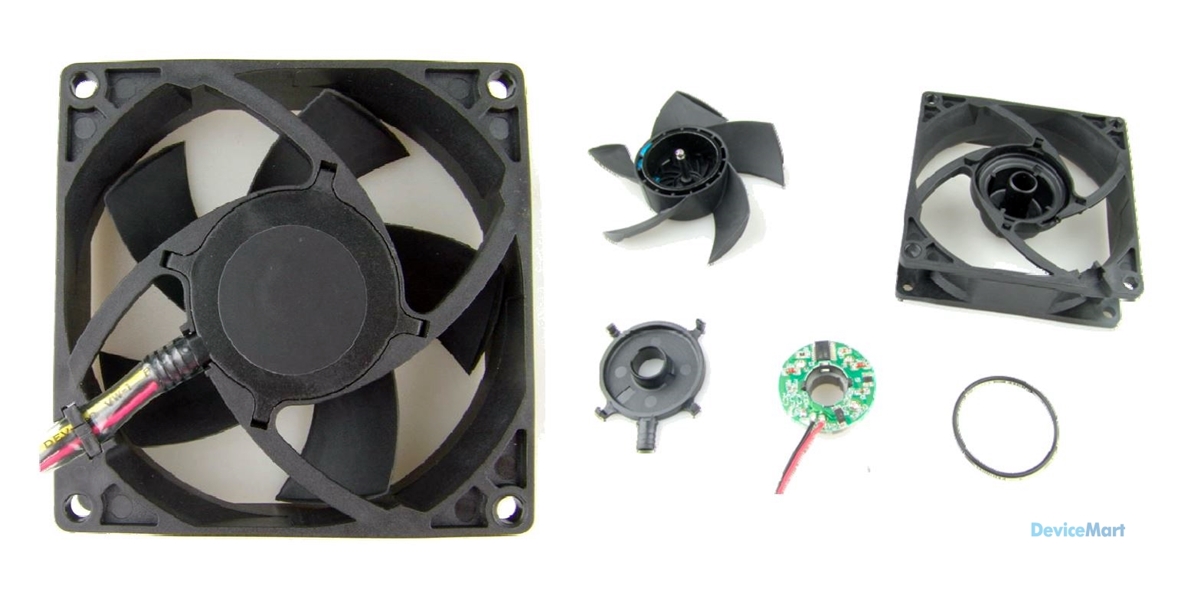
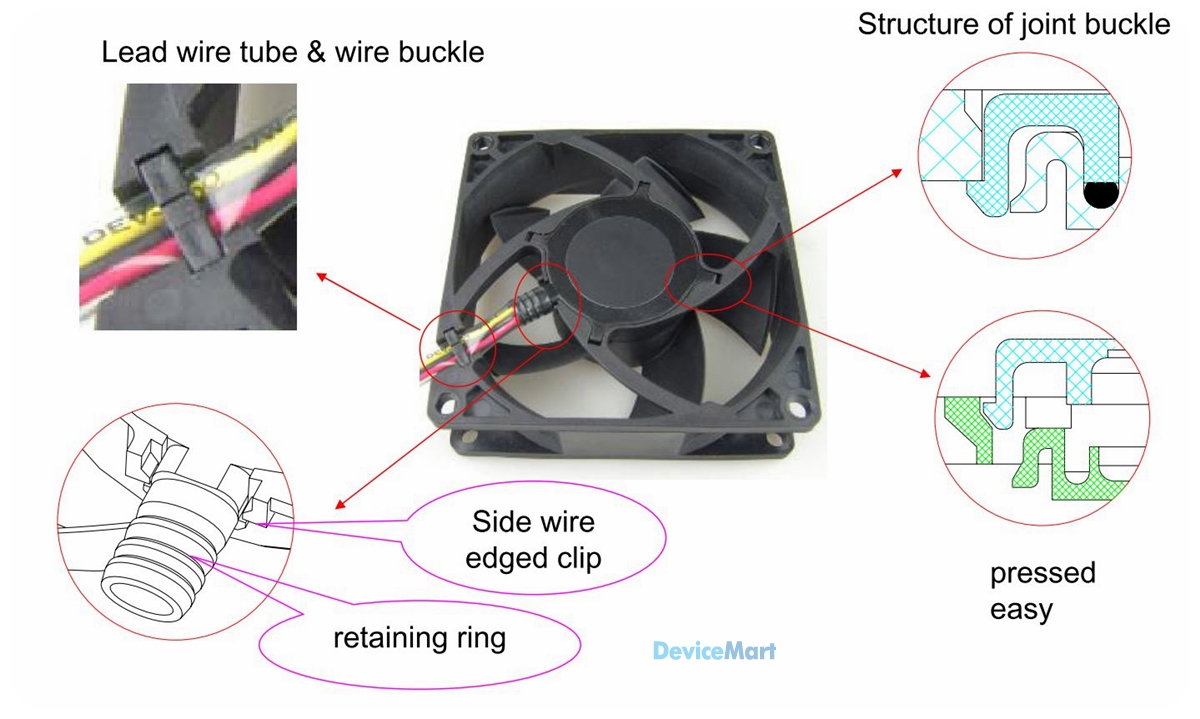
IP68 완전방수 DC 냉각팬! 물속에서 사용가능! 디바이스마트 독점 판매!

* 동영상은 IP FAN 구동 영상입니다.

PROTECHNIC IP FAN / IP 68등급의 최초 냉각팬
판재 진행을 위한 페이지 구상중 입니다. 완료 시점 내용 수정하여 각 상품의 파트와 가격. 리스트업을 하도록 하겠습니다. 기타 문의는 edgar@ntrex.co.kr 으로 메일 주시면 바로 확인하여 답변 드리도록 하겠습니다. 감사합니다.
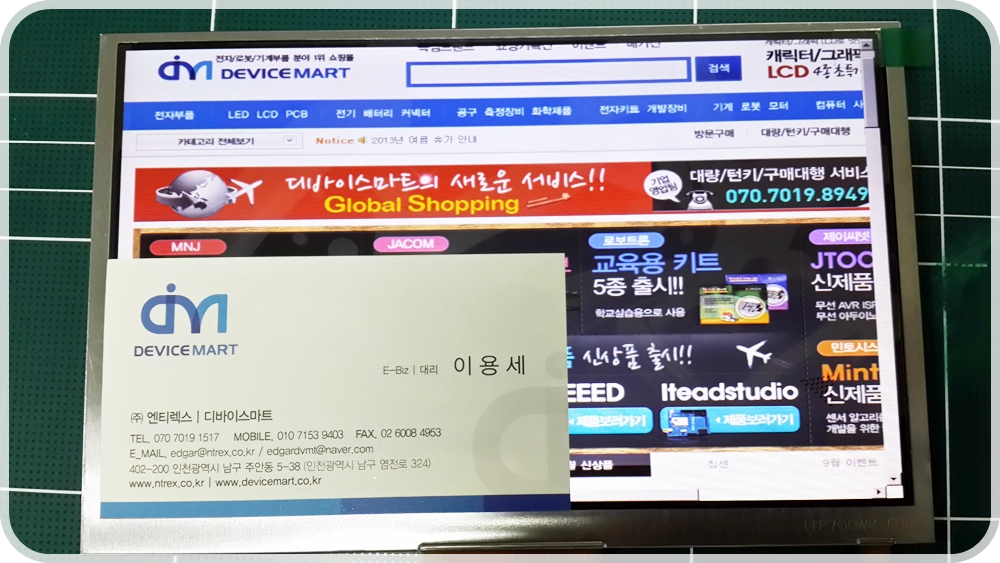
디바이스마트 TFT LCD(LMS700KF06) + A/D BOARD(FCB302WV-7(Rev1.0)) SET 구동


디바이스마트 TFT LCD(LMS700KF06) + A/D BOARD(FCB302WV-7 SET 개발을 하다보면 LCD 패널이 필요한 경우가 많이 있습니다. 필요한 경우에 따라서 일반도트의 캐릭터LCD , 그래픽LCD 를 활용하기도 하지만 COLOR LCD 활용 범위가 넓지만 손쉽게 구할 수 있는 LCD 패널에 비하여 A/D BOARD는 구하기 어렵습니다. 이유는 수많은 종류의 LCD 패널에 사용 가능한 A/D BOARD를 만드는 것은 수요 가치가 떨어지기 때문입니다. 그러한 이유로 보다 전문적인 부분의 BOARD 생산을 해야 하는 경우가 있는데 디자인 하는 것은 물론 만들어지기까지가 복잡하고 많은 비용이 들어가게 됩니다. 일반적으로 양산 아니고는 생각하기 어려운 부분. 이런 문제 해결을 위한 OEM 생산으로 많이 사용되는 몇가지 패널을 연결만 하면 사용가능한 A/D BOARD를 여러 업체에서 만들어 판매중에 있으며, SET 형태로 판매매 하기도 합니다. 소비자 입장에서는 LCD 패널의 종류, LED 라이트인지와 패널의 사이즈, 패널의 해상도, A/D BOARD 의 사이즈 정도를 참고하여 구매결정을 하면 됩니다. SET 제품의 좋은점은 LCD 패널과 구동 A/D BOARD 만 있다면 전원을 연결하여 영상 신호만 주면 화면에 바로 출력되는 모니터제품으로 이해하면 쉽습니다.
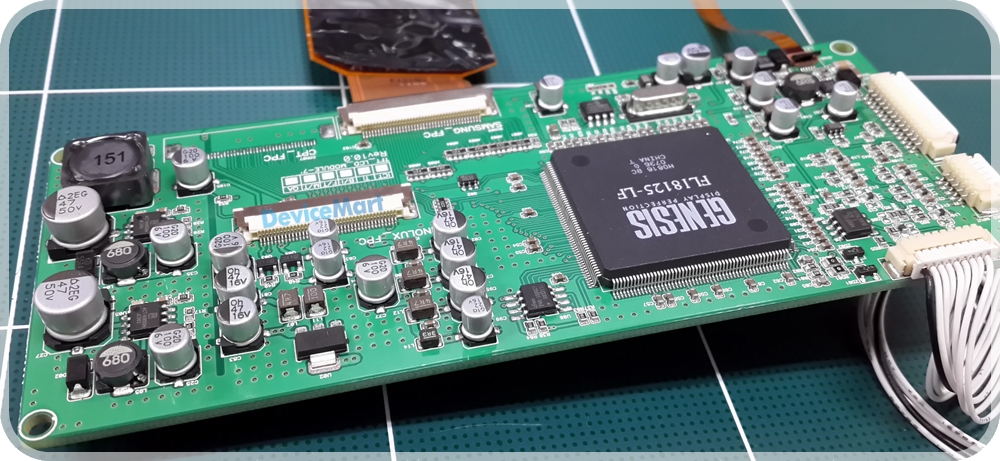
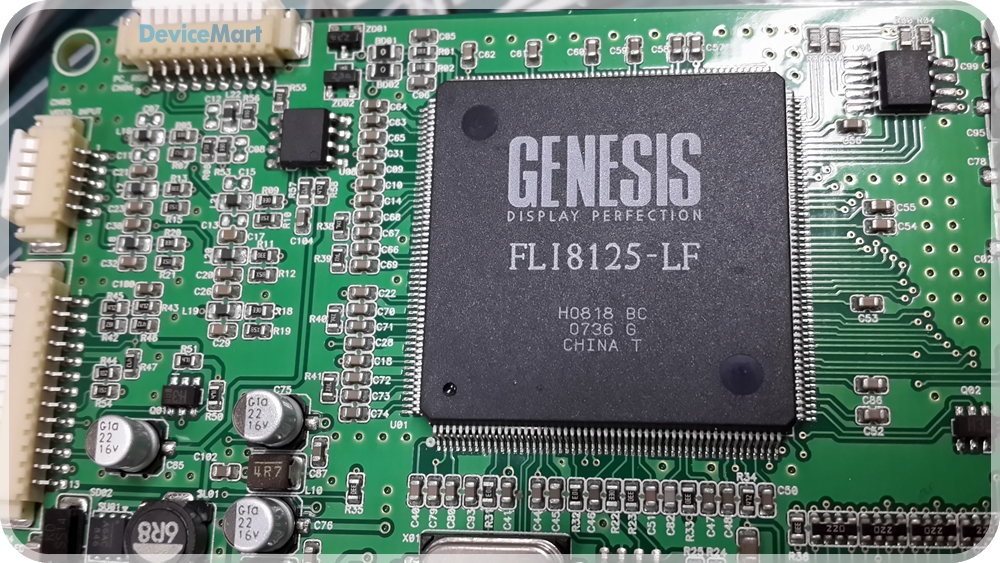
FCB302WV-7(Rev1.0) AD BOARD (FLI8125-LF)
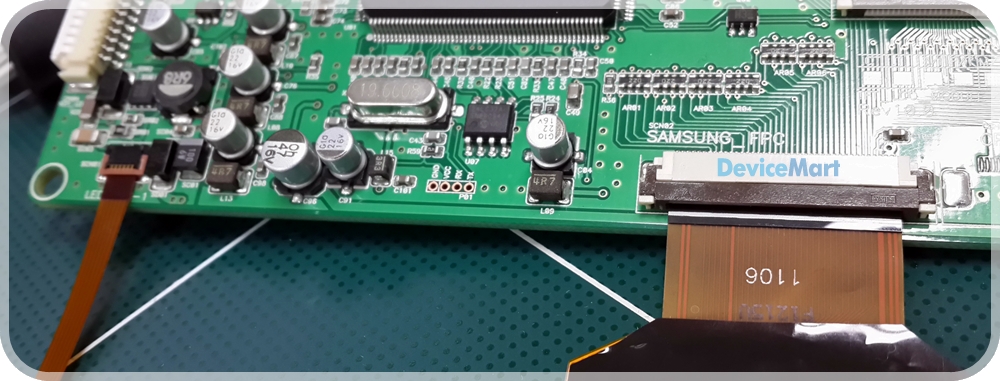
7인치 LCD 전용으로 만들어진 보드입니다. 함께 SET 상품으로 판매되는 패널은 LMS700KF06 으로 보드에 FPC 케이블을 연결하여 전원과 신호케이블 연결으로 작업은 끝이납니다. 선 연결은 백라이트 케이블과 영상신호 케이블 두가지 입니다. 연결 커넥터는 LOCK 타입으로 연결후 케이블선 이탈 이 쉽게 되지 않습니다.

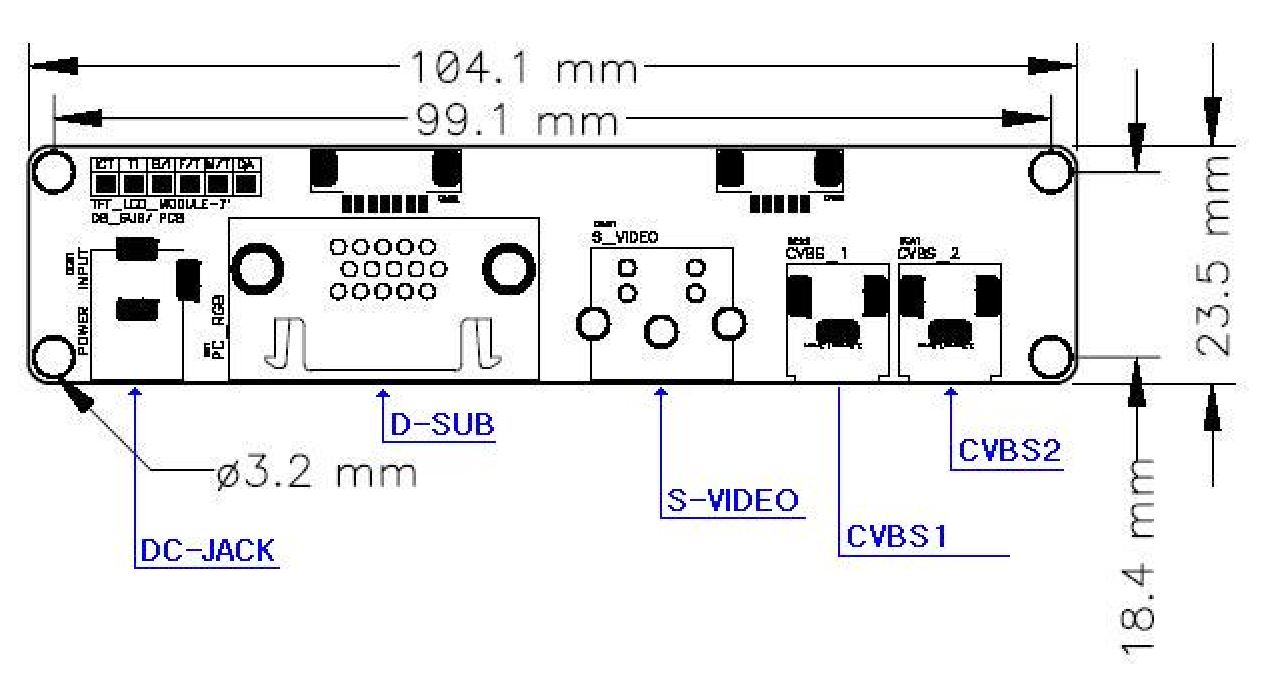
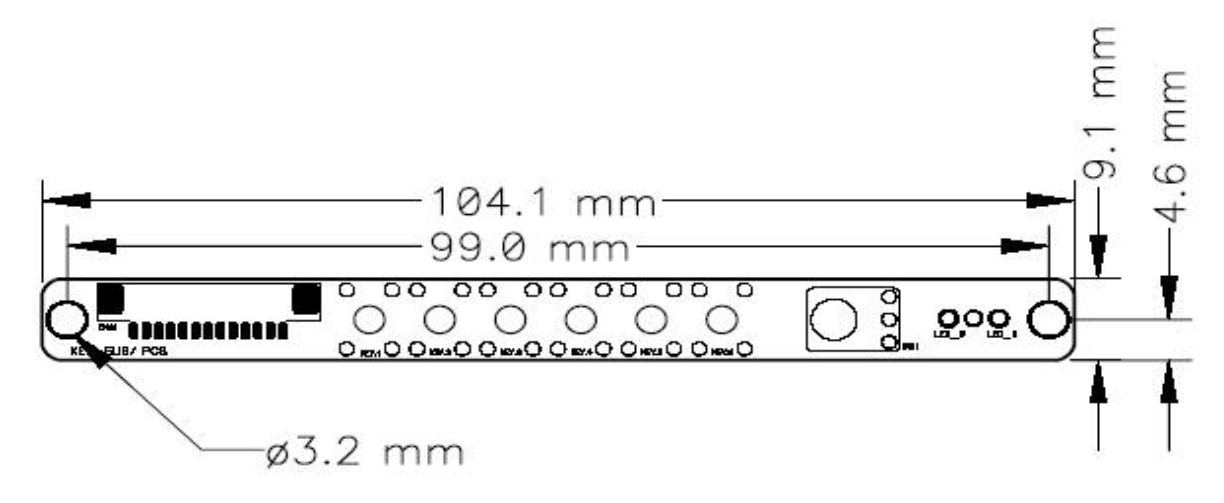
SUB Board Dimension
연결 커넥터 보드에는 AD BOARD 전원 DC잭, 15핀 디서브, S비디오, 케이블 RC잭(영상1,2) 커넥터가 달려있으며 크기는 104mm * 23.5mm 정도이다. 손쉽게 케이블 연결만 하면 되고 메인보드와 전선으로 연결되어 있어 별도 케이스에 구성이 자유롭습니다. 또는 사용할 커넥터 부분만 보드에서 따로 작업하여 케이스외부에 고정하는 방법도 많이 사용됩니다.
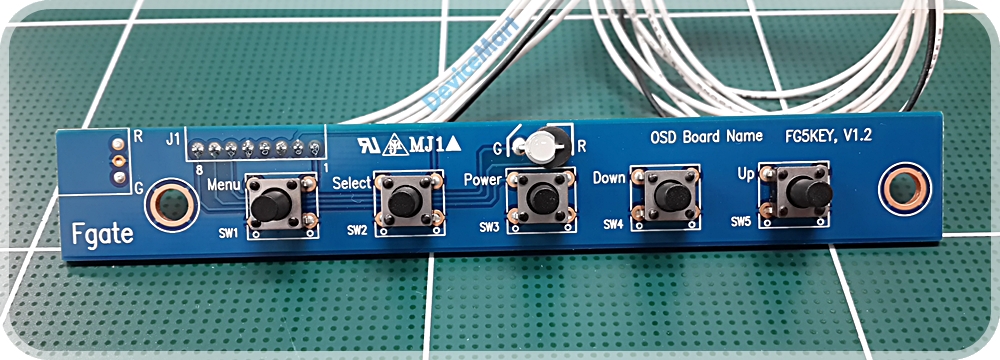
컨트롤 보드입니다. 메뉴/선택/전원/조작 업,다운 스위치로 출력되는 모니터를 조정할 수 있습니다. 보드 전원 여부는 LED 발광으로 확인 할 수 있습니다.
위드로봇 myAHRS 출시!! 한정 할인 이벤트!!
디바이스마트 독점 업체인 위드로봇 에서 신제품인 myAHRS를 출시했습니다.
제품 특징
myAHRS는 3차원 공간상의 방위각(Heading)과 자세(Attitude) 정보를 UART/I2C/USB 인터페이스로 제공해 주는 센서 모듈 입니다. . 다양한 프로젝트에 적용 가능하도록 초소형으로 제작되었습니다.
MCU를 사용하여 임베디드 시스템을 꾸밀 수 있도록, UART 인터페이스와 더불어 1kHz 고속 임베디드 시스템을 위한 I2C 인터페이스를 제공합니다.
UART/USB 인터페이스를 통해 PC와 직접 연결하여 사용할 수 있습니다. myAHRS를 사용한 다양한 PC 프로그램도 만들 수 있습니다.
가속도/자이로 센서에 익숙하지 않은 초보 사용자도 쉽게 사용할 수 있는 myMotion 커맨드 센터(myMotionCC)프로그램을 지원합니다. myMotionCC 로 센서 값을 그래프로 확인할 수 있습니다.
기능상특징
- myMotion 커맨드 센터 지원
- 센서 테스트 및 출력 값 확인
- 손쉬운 설정 변경
- 간편한 F/W 업데이트
- 고속 데이터 출력(UART/USB : 100Hz, I2C : 1kHz)
- myARS-USB와 pin to pin 호환
- myMotion 제품군은 모두 같은 pin map을 가짐
- Heading angle 측정범위 : 자북기준 -180° ~ 180°
- Roll angle 측정범위 : 지표면 기준 -180° ~ 180°
- Pitch angle 측정범위 : 지표면 기준 -90° ~ 90°
- UART/I2C/USB 인터페이스 지원
- Data ready 인터럽트 출력
- 저전력 sleep mode 지원
- -40도에서 +85도까지의 넓은 동작 온도 범위
- 브레드 보드에 연결이 편리한 2.54mm 간격의 헤더핀 인터페이스
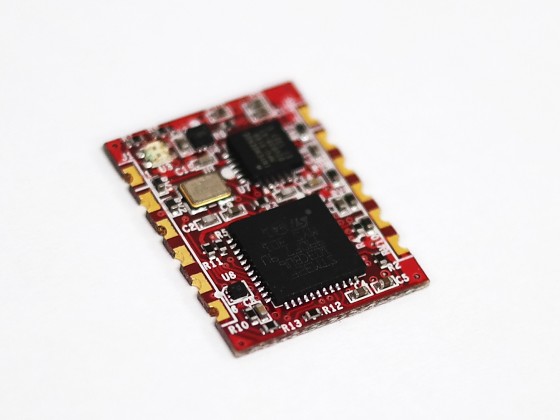
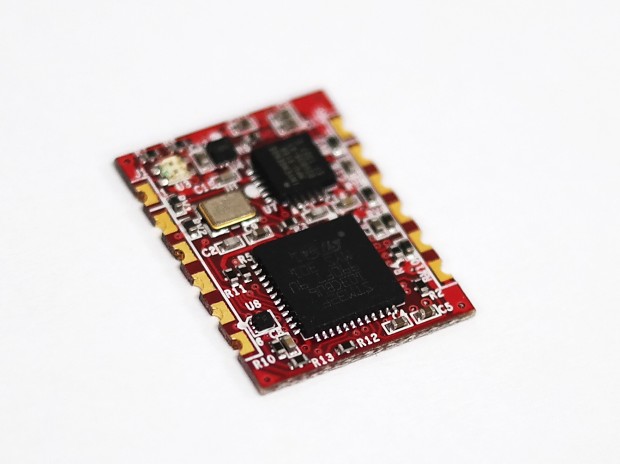
- 14.84mm x 19.94mm의 초소형 크기
응용분야
- 쿼드로터(Quad-rotor) 등 모형 비행체의 자세 및 이동방향 측정
- 차량의 자세 및 이동방향 측정
- 모션 컨트롤러의 자세 측정
- 기타 동체의 자세와 방위각을 측정하여, 가상 공간에 반영하는 분야 (ex: 사람 손의 자세 캡쳐)
외형 치수 및 보드 설명
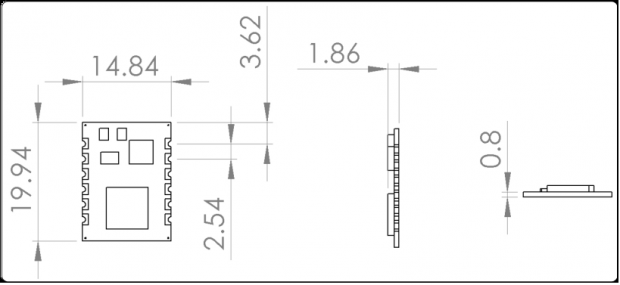
<치수>
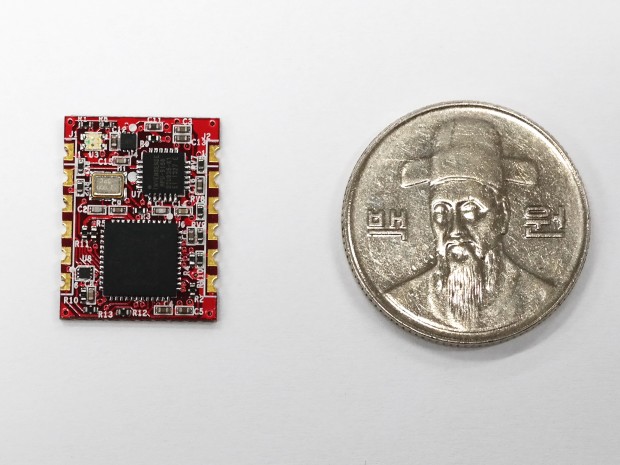
<비교사진>
|
핀번호 |
이름 |
구분 |
설명 |
|
1 |
INT |
O |
DATA READY 인터럽트 출력 |
|
2 |
SLEEP |
I |
슬립모드 선택 입력.L-슬립모드,H-일반 모드. 연결하지 않을 경우 일반 모드로 동작. |
|
3 |
I2C_SCL |
I |
I2C 클록 입력 |
|
4 |
I2C_SDA |
I/O |
I2C 데이터 입출력 |
|
5 |
USB_DM |
I/O |
USB D- |
|
6 |
USB_DP |
I/O |
USB D+ |
|
7 |
GND |
PWR |
파워 그라운드. 0V |
|
8 |
UART_RX |
I |
UART 수신 |
|
9 |
UART_TX |
O |
UART 송신 |
|
10 |
NC |
NC |
아무것도 연결하지 않음 |
|
11 |
Nrst |
I |
리셋 입력. L-리셋, H-정상 |
|
12 |
VDD |
PWR |
+5V 전원 입력 |
<핀 설명>

출시기념 한정수량 이벤트중입니다.
오직 디바이스마트에서만 만나보실수 있습니다.
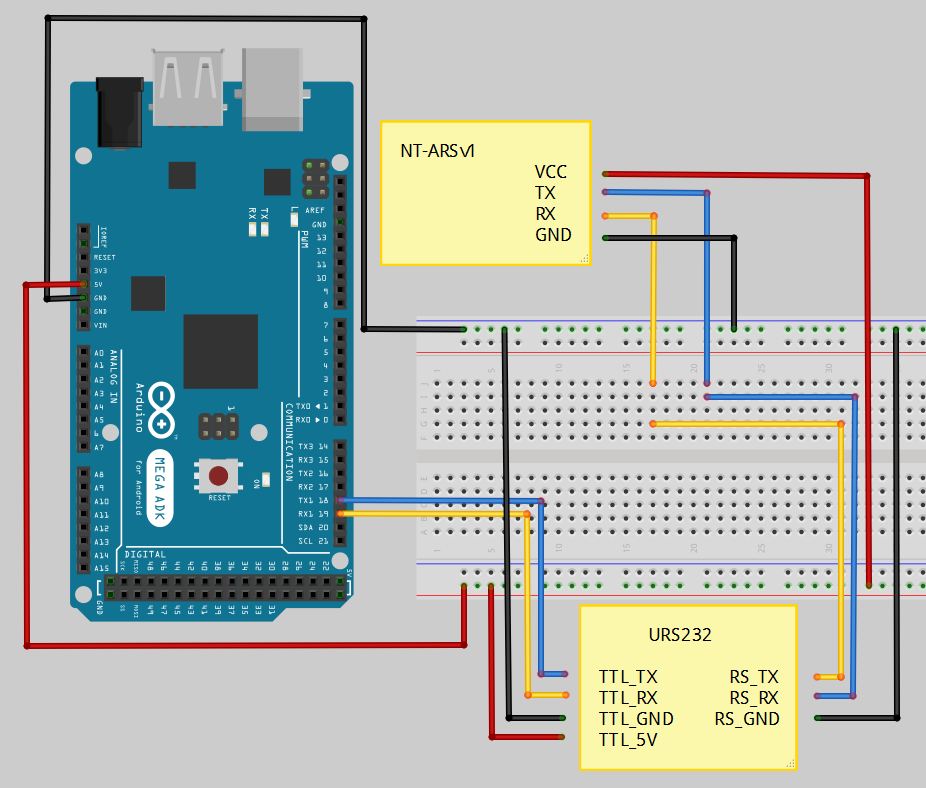
아두이노에서 NT-ARSv1의 데이터를 받는 예제
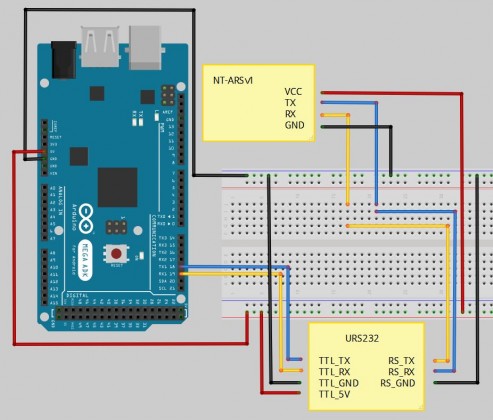
NT-ARSv1의 출력 데이터를 아두이노에서 해석하는 예제입니다. Roll, Pitch와 그 각속도 이렇게 4개의 값중에서 사용자가 선택할 수 있으며, 출력된 데이터는 문자열이 아니라 double형의 숫자로 받도록 했습니다. 이미 예전에 [바로가기]에서 NT-ARSv1의 데이터를 받는 부분을 다루었는데요. 당시에는 단순히 값을 한 번 확인하는 것과 아두이노와 ARS와의 연결에 대한 부분을 다루었다면 이번에는 약간 함수화를 했습니다. 기본적으로 하드웨어적인 연결은 [바로가기]와 같으니 먼저 읽고 넘어오시기 바랍니다.
일단 오늘 보여드릴 예제는 몇몇개의 함수로 구현되어 있어서 함수별로 하나씩 확인해보도록 하겠습니다.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 |
String getARSresultAtOnece() { String outputValuesOfARS = ""; Serial1.print("<CAO>"); delay(2); while (Serial1.available()) { char incomingChar = Serial1.read(); outputValuesOfARS += incomingChar; } return outputValuesOfARS; } |
먼저 getARSresultAtOnce() 함수입니다. 이 함수는 NT-ARSv1의 데이터를 STRING의 형태로 저장하는 것이 목적입니다. 여러가지 형태로 다양하게 사용하실려면 이 함수만 사용하신 다음 간편하게 응용하시면 됩니다. 함수이름에도 나타나 있지만, ARS의 <CAO>명령을 사용합니다. 만약 사용자가 <CAH>명령을 사용하고자 하시면 이후 코딩을 다르게 작성하셔야합니다. 그리고 6번 행의 delay문은 <CAO>명령을 하달한 다음 바로 시리얼 데이터를 읽도록 해버리면 미처 데이터가 도착하기 전에 지나가버립니다. 그래서 적절한 시간만큼 기다리라고 해둔겁니다. 물론 데이터가 실제로 들어올때까지 기다리라는 조건문을 넣어둘 수도 있지만, 그러면 또한 여러가지 이유로 실제 데이터가 도착하지 않는 에러 상황이 발생했을때, 대응하는 코딩을 해야하기도 하고, 이 글은 NT-ARSv1을 아두이노에서 간편히 사용하실 분들을 위한 부분이라 그냥 단순하게 delay문으로 처리했습니다.
실제 핵심은 8번에서 11번행입니다. 아두이노는 데이터를 시리얼 통신으로 쓸때는 String 변수를 사용하는 것이 가능하지만, 받을때는 char형만 가능하므로 위 코드처럼 받은 하나의 문자를 누적해서 저장하게 됩니다. 여기서도 에러에 대한 방어는 빠져 있는데요. “>”라는 문자가 눈에 보이는 마지막문자이고, 실제로는 캐리지리턴이 같이 들어옵니다만, 여하튼 제대로 하나의 데이터가 다 들어왔는지 체크하실려면 저 부분에 “>”라는 문자가 들어왔는지를 확인할 필요가 있습니다. 또한 콤마”,”가 3개가 들어왔는지까지 카운팅하시면 에러방어대책은 충분할 것입니다만, 지금은 예제거든요^^
이제 위의 getARSresultAtOnce() 함수를 사용해서 roll값을 받는 부분을 별도로 getRollAngle()이라는 함수로 만들었습니다.
|
1 2 3 4 5 6 7 8 9 10 |
double getRollAngle() { String outputValuesOfARS = getARSresultAtOnece(); int firstComma = outputValuesOfARS.indexOf(','); String rollAngleST = outputValuesOfARS.substring(1, firstComma); double rollAngle = rollAngleST.toInt() * 0.001; return rollAngle; } |
getARSresultAtOnce()의 결과 데이터가 <roll, pitch, roll_vel, pitch_vel>의 형태로 저장되는데요. 이 결과에서 roll데이터만 추출하는 것입니다. 먼저 4번행에서 아두이노의 String 클래스에서 지원하는 indexOf()라는 함수를 이용해서 콤마(,)의 위치를 찾고, 5번행에서 substring()함수를 이용해서 roll데이터 부분만 추출합니다. 아직까지는 String 형태이므로 7번행에서 toInt()함수를 이용해서 숫자의 형태로 변환합니다. 그리고 NT-ARSv1은 내부적으로 1000이 곱해서 출력되므로, 다시 0.001로 나눠줍니다. 이렇게 하면 radian단위의 각도로 roll을 얻을 수 있습니다.
|
1 2 3 4 5 6 7 8 9 10 11 |
double getPitchAngle() { String outputValuesOfARS = getARSresultAtOnece(); int firstComma = outputValuesOfARS.indexOf(','); int secondComma = outputValuesOfARS.indexOf(',', firstComma+1); String pithchAngleST = outputValuesOfARS.substring(firstComma+1, secondComma); double pitchAngle = pithchAngleST.toInt() * 0.001; return pitchAngle; } |
그 다음은 getPitchAngle()함수로 별 설명이 없어도 알 수 있으실 테지만, 두번째 데이터인 Pitch를 추출하는 함수입니다. getRollAngle() 함수와 다른 점은 Pitch 데이터는 첫 번째 콤마(,) 부터 두번째 콤마 사이에 있는 데이터이기 때문에 4번 5번행처럼 첫째 두번째 콤마를 찾아야합니다. 그리고 나머지는 동일합니다. 이런 원리로 NT-ARSv1의 세번째 네번째 데이터인 각각의 각 속도도 추출할 수 있습니다. 이제 전체 코드를 보여드리면,
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 |
// 2013.09.16 NTRexLAB. // NT-ARSv1 example // ARDUINO MEGA ADK. ARDUINO IDE 1.0.5 void setup() { // initialize serial and serial1 communications at 115200 bps: Serial.begin(115200); Serial1.begin(115200); } void loop() { double rad2degree = 180/3.141592; double rollAngle = getRollAngle(); Serial.print(" Roll Angle is "); Serial.print(rollAngle*rad2degree); Serial.println(" degree."); double pitchAngle = getPitchAngle(); Serial.print(" Pitch Angle is "); Serial.print(pitchAngle*rad2degree); Serial.println(" degree."); double rollAngVel = getRollAngVel(); Serial.print(" Roll Angular velocity is "); Serial.print(rollAngVel*rad2degree); Serial.println(" degree/second."); double pitchAngVel = getPitchAngVel(); Serial.print(" Pitch Angular velocity is "); Serial.print(pitchAngVel*rad2degree); Serial.println(" degree/second."); while(true); } // Getting output data of NT-ARSv1 after "<CAO"> commander. // The resulting data is stored in the form of a String. String getARSresultAtOnece() { String outputValuesOfARS = ""; Serial1.print("<CAO>"); delay(2); while (Serial1.available()) { char incomingChar = Serial1.read(); outputValuesOfARS += incomingChar; } return outputValuesOfARS; } double getRollAngle() { String outputValuesOfARS = getARSresultAtOnece(); int firstComma = outputValuesOfARS.indexOf(','); String rollAngleST = outputValuesOfARS.substring(1, firstComma); double rollAngle = rollAngleST.toInt() * 0.001; return rollAngle; } double getPitchAngle() { String outputValuesOfARS = getARSresultAtOnece(); int firstComma = outputValuesOfARS.indexOf(','); int secondComma = outputValuesOfARS.indexOf(',', firstComma+1); String pithchAngleST = outputValuesOfARS.substring(firstComma+1, secondComma); double pitchAngle = pithchAngleST.toInt() * 0.001; return pitchAngle; } double getRollAngVel() { String outputValuesOfARS = getARSresultAtOnece(); int firstComma = outputValuesOfARS.indexOf(','); int secondComma = outputValuesOfARS.indexOf(',', firstComma+1); int thirdComma = outputValuesOfARS.indexOf(',', secondComma+1); String rollAngVelST = outputValuesOfARS.substring(secondComma+1, thirdComma); double rollAngVel = rollAngVelST.toInt() * 0.001; return rollAngVel; } double getPitchAngVel() { String outputValuesOfARS = getARSresultAtOnece(); int firstComma = outputValuesOfARS.indexOf(','); int secondComma = outputValuesOfARS.indexOf(',', firstComma+1); int thirdComma = outputValuesOfARS.indexOf(',', secondComma+1); String pithchAngVelST = outputValuesOfARS.substring(thirdComma+1, outputValuesOfARS.length() - 3); double pithchAngVel = pithchAngVelST.toInt() * 0.001; return pithchAngVel; } |
38번행 이후는 위에서 쭈욱 설명드린 그대로 입니다. 다시 한번 말씀드리지만 NT-ARSv1을 아두이노에서 사용하기 위한 하나의 예제로 발생할 수 있는 에러나 예외상황에 대한 대비는 없습니다.^^.
그리고, 11번부터 36번행은 이렇게 추출된 데이터를 사용한 것일 뿐입니다. 이 예제는 [바로가기]와 같은 하드웨어적인 연결을 가지기 때문에 ADK MEGA 보드를 사용했습니다. 그래서 ARS와의 연결은 Serial1에 PC와는 Serial에 연결되어 있으며 두 통신 속도는 모두 115200으로 세팅되어 있습니다. 출력되는 각도는 함수를 설명드릴때 했지만 라디안(radian)단위이기 때문에 눈으로 쉽게 확인하게 하기위해 degree로 변환해서 보여줍니다.

이렇게 해서 시리얼 모니터로 출력하면 위 그림과 같은 결과를 얻을 수 있습니다. 이제 NT-ARSv1을 아두이노에서 핸들링하고자 하시는 분들께 하나의 예제를 보여드린듯 합니다.