RC 조종기와 MoonWalker의 연결

지난번 MoonWalker와 PC Control UI Program과의 최초 연결에 대한 동영상 강의[바로가기]에 이어서 이번에는 흔히들 많이 사용하시는 RC 조종기와 MoonWalker를 연결하는 방법에 대해 이야기를 하겠습니다. 오늘 다루는 내용은 토크/속도/위치 제어기의 설정이 아니라 단순히 RC 조종기와 어떻게 연결하는가에 대한 이야기입니다. 오늘 다루는 제품은 MoonWalker 시리즈 중에서 MW DCM02 모델이며 RC 조종기는 그냥 일반적인 조종기입니다.
간단하게 연결하는 방법에 대해 이야기를 드릴 것이기 때문에 복잡하지 않습니다.
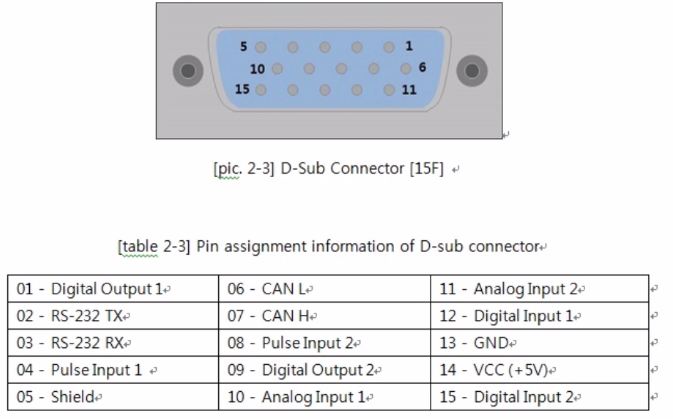
먼저 RC 조종기의 수신부는 Pulse형태의 출력을 가지기 때문에 MoonWalker의 Pulse Input 단자를 사용하시면 됩니다. 제품에 따라 단자의 위치나 형태가 다르므로 꼭 메뉴얼 통해 확인을 하시기 바랍니다. 만약 2채널로 사용하고 싶으시다면 Pulse Input 2에도 연결을 하시면 됩니다.
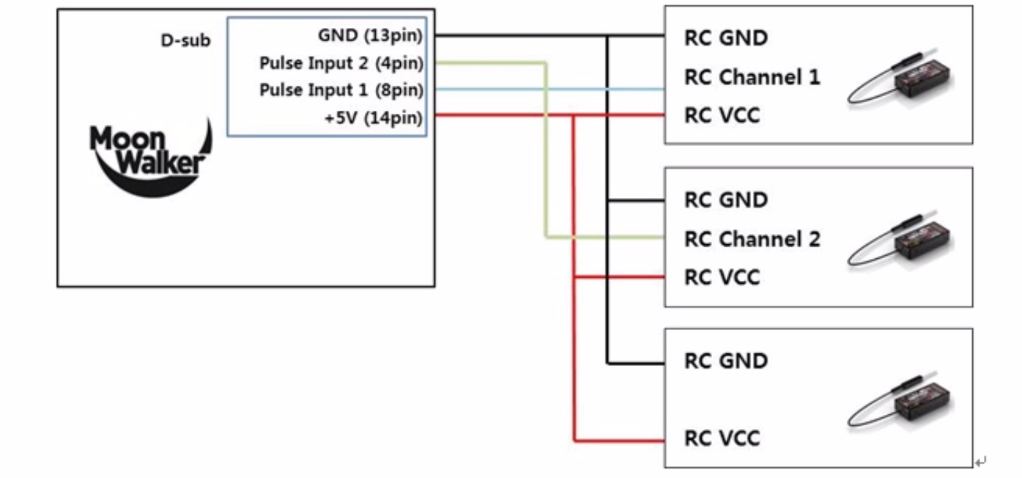
좀 더 자세히는 위 그림과 같습니다. RC Receiver의 1-2 채널은 각각 문워커의 Pulse Input 1 -2에 연결하시고, GND와 VCC도 연결하시면 됩니다. MoonWalker에서 제공하는 기본 5V 아웃 단자를 사용하시면 됩니다만, 사용하실려는 조종기 리시버의 구동 전압을 확인하시기 바랍니다. 또한 조종기 리시버의 소모전류가 메뉴얼에 명시되어 있는 5V 전압 단자의 출력 전류보다 작은지도 확인하시기 바랍니다. 만약 그렇지 않다면 사용하실려는 RC 조종기의 리시버를 구동하기 위해 별도의 전원을 인가하셔야할 수도 있습니다.
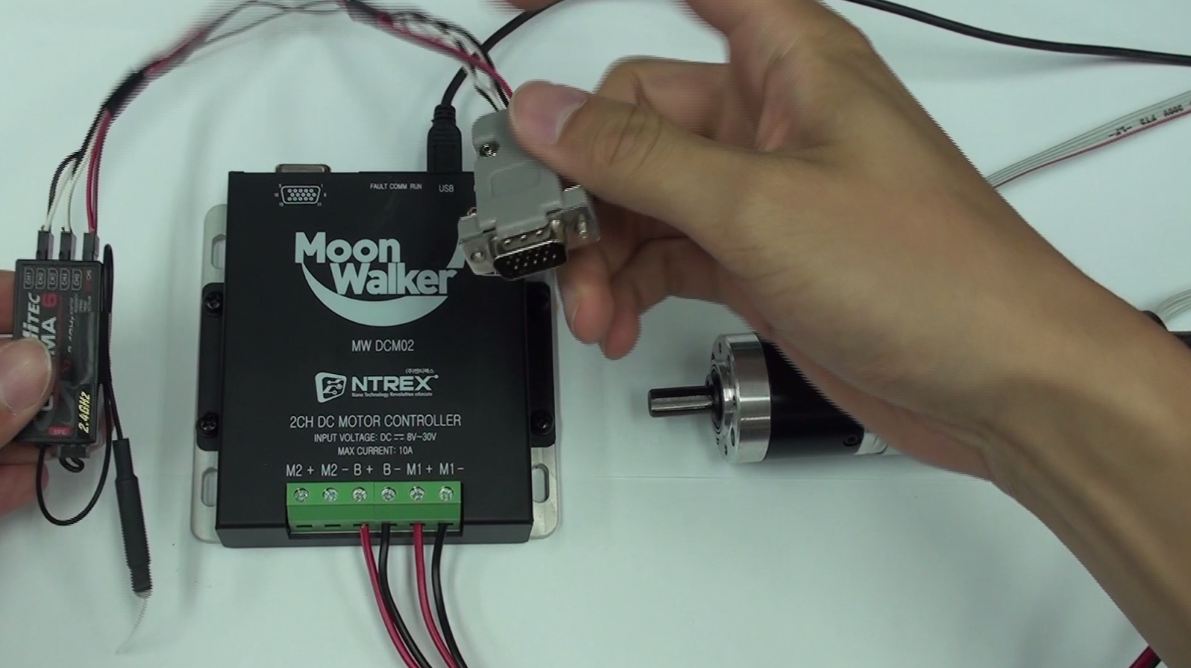
그리고 MW DCM02 모델의 경우는 D-Sub 단자를 사용하므로 위 사진 처럼 결선하시면 됩니다.
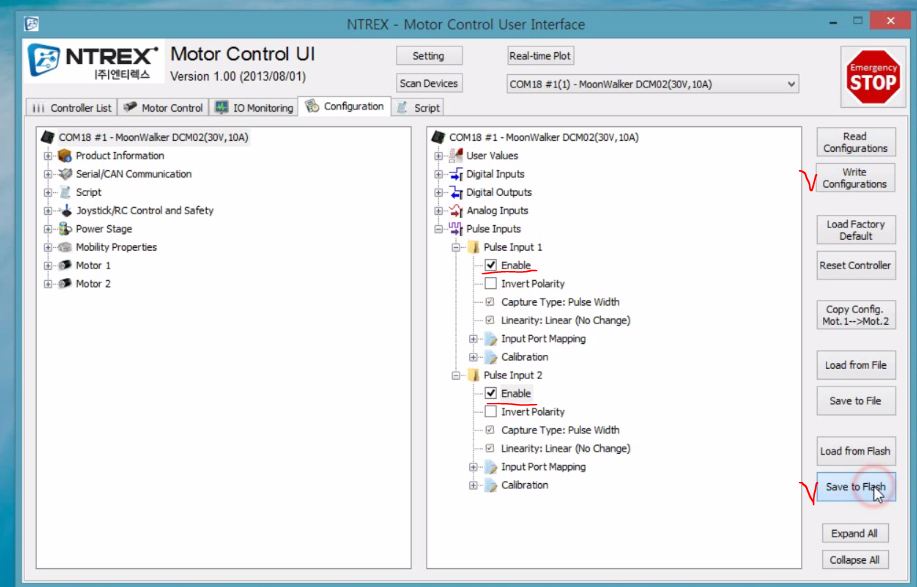
그리고 별다를 설정없이 그냥 (왜냐면 이 글은 단순히 RC 조종기와의 연결만 다루니까요^^) 위 그림처럼 Pulse Input 1, 2를 각각 Enable 시키시면 됩니다. 기르고 Write Configuration과 Save to Flash를 각각 클릭하시면 됩니다.
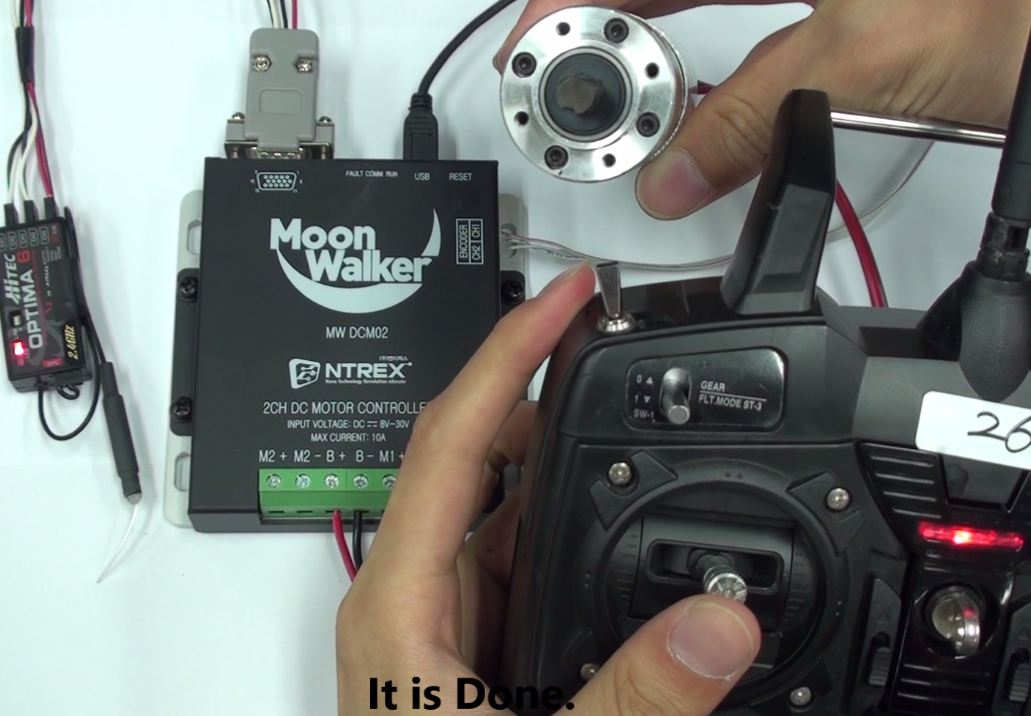
그러면 이렇게 손쉽게 RC 조종기를 이용해서 모터를 하나 혹은 두개를 구동하실 수 있습니다^^ 전체 과정은 동영상으로 한 번 보시죠^^
MoonWalker의 나머지 강의와 관련 자료를 받으실려면 공식 홈페이지[바로가기]를 방문해 주세요^^
2013년 계룡대 벤쳐 국방 마트 전시회를 다녀왔습니다.

지난번 국군의날에 계룡대에서 개최된 지상군 페스티벌의 일환으로 벤쳐 국방 마트 전시회를 저희 연구소도 참가했습니다. 다양한 국방관련 장비들을 볼 수 있었으며 저희 제품에도 많은 분들이 호응을 해 주셨습니다.

저희는 위에 보이는 세개의 제품을 출시 했구요. 최근에 뉴스에도 나온[바로가기] 그 로봇들이랍니다.^^

벤쳐국방마트에는 다양하고 많은 제품들이 출시되어 있었는데요

이런 전투용 군복이나


이렇게 각도에 따라 투과비율이 달라지는 필름

아예 군 작전용 차량까지도 전시가 되었습니다.

이 제품은 태양광 충전식 장비들인데요. 좀더 많은 전력을 사용할 수 있도록 고안되었고 국 작전에 맞도록 설계되었다고 하더군요


이건 다용도 케이스(펠리칸)인데요. 저희도 출품작이 이런 케이스를 필요로 해서 살짝 관심있게 구경했답니다.


이 제품은 3D 정찰용 장비라고 하더군요. 위에 있는 차량에 레이더를 달고 시연하고 있더라구요.
이렇게 좋은 제품들이 전시되는 곳에 저희도 함께 할 수 있어서 좋았답니다.^^. 이제 10월 말에는 로보월드가 개최되네요. 저희 연구소도 출품하니 그때 또 좋은 모습으로 찾아가도록 하겠습니다.
Motor Control UI Utility
Motor Control UI 유틸리티는 사용자가 PC에서 MoonWalker Mobile제어기에 연결하여, 제어기의 각종 구성 파라미터 설정 및 모니터링, 제어가 가능한 유틸리티 입니다.
i-Servo 제품은 우측 링크에서 다운받으시면 됩니다. (http://mwbot.co.kr/data/1939)
i-Step 제품은 우측링크에서 다운받으시면 됩니다.(http://mwbot.co.kr/data/1931)
2014.02.04 MoonWalker Motor Control UI Utitity v1.10 다운로드
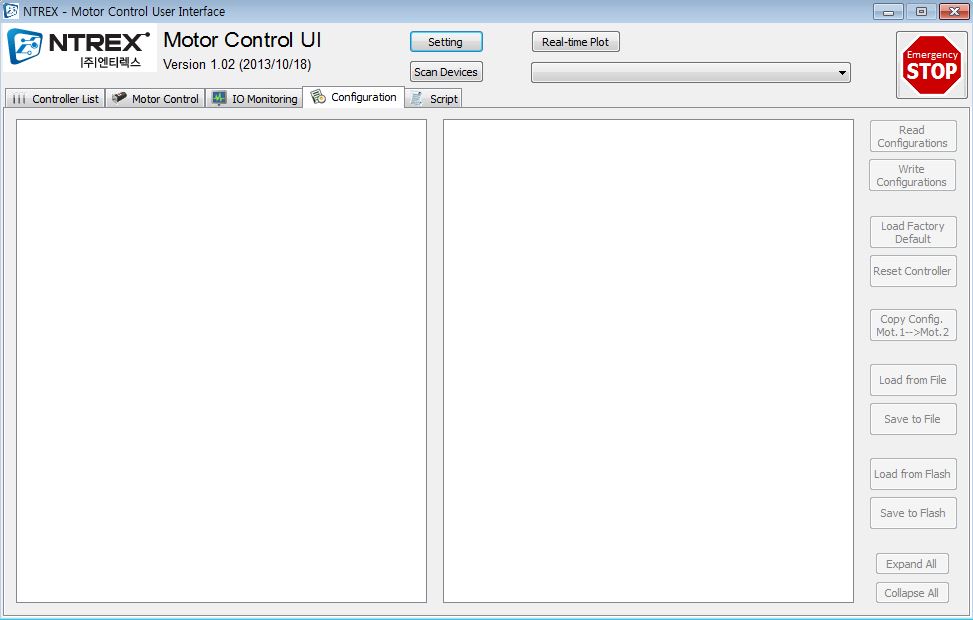
본 프로그램은 설치형 제품이 아닙니다. 다운로드 받은 파일의 압축을 풀고 MotorControlUI.exe를 실행하면 다음과 같은 창이 뜹니다. MoonWalker와 PC를 연결 후 Scan Devices 버튼을 누르시면 연결이 됩니다. 자세한 사용법은 사용자 메뉴얼을 참고하십시오.
일부 바이러스 프로그램에서 저희 실행화일을 전송하라는 메세지가 뜰 수 있지만 이는 악성코드가 아니라 분석용으로 관찰하겠다는 뜻으로 이상이 없습니다. 저희 MoonWalker 컨트롤러의 Control UI Utility는 한국 저작권 위원회에 정식으로 등록을 한 제품입니다.
장애물 극복 및 정찰용 로봇인 AstroBoyS가 뉴스에 소개되었네요^^

최근 인천에서는 인천 로봇랜드 착공식이 열렸는데요. 저희 연구소의 로봇도 몇 몇이 전시를 했답니다. 황송스럽게도 메인이벤트에 포함되어서 두 대가 시연을 했네요^^. 그런데 그 장면이 SBS 뉴스에 살짝 노출이 되었답니다. 물론 아주 살짝입니다만^^

장애물 극복 및 정찰용 특수 목적 로봇으로 AstroBoyS라는 프로젝트 이름을 가지고 있습니다.

흠… 요런 사진을 올려서 아나운서분께 죄송하네요^^

플리퍼형 로봇은 계단이나 무너진 건물 더미같은 장애물을 손쉽게 극복하기 위해 고안되었습니다.

그 뒤에 6WD위에 또한 총기와 카메라를 장착해서 적 혹은 타켓을 타격하는 용도이구요.

식전행사에서는 모두 명중시켰는데 정작 본식에서는 이게 진짜총이 아니다보니 약간 미스가 있었어요^^

이번 제품은 플리퍼에 또 궤도를 감은 형태입니다. 이제 몇일후 이 플리퍼형 로봇은 궤도가 있는 형태와 없는 형태가 각각 디바이스마트를 통해 판매를 시작하게 된답니다.
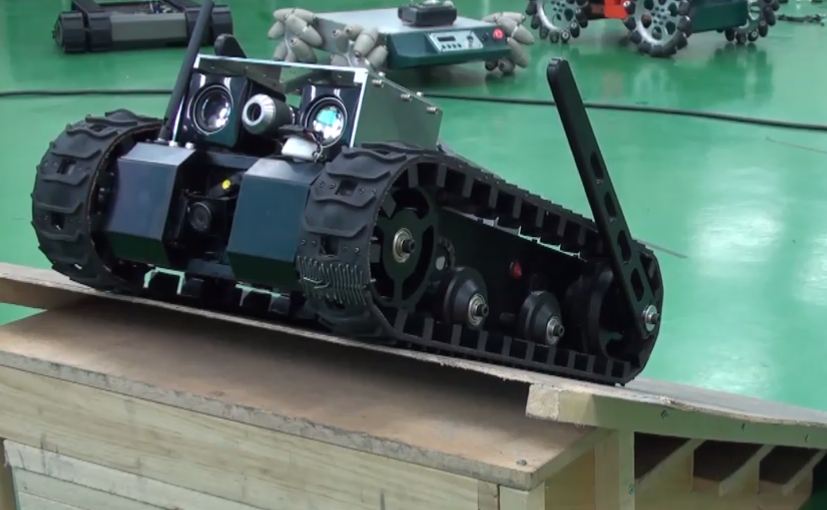
이 모델은 플리퍼에 궤도가 없는 형태인데요. 앞의 카메라는 Tilt를 조절할 수 있도록 되어 있지요.

플리퍼에 궤도가 없는 타입도 이렇게 장애물 극복을 쉽게 할 수 있답니다.

이건 2012년에 실제 제작후 실전 연습도 한 로봇인데요. 위에 장착된것이 무반동 물분사포랍니다.

아주 위력적이더라구요.^^. 나머지는 모두 동영상에서 확인이 가능합니다. 곧 출시될 것이니 다시 상세히 소개하겠습니다.^^ 이제 동영상으로 살짝 감상하세요. 아참 뉴스에서는 아~주 살짝만 소개되었기 때문에(ㅠㅠ) 동영상 뒷부분은 저희가 테스트했던 장면들이 들어가있습니다.
MoonWalker User Manual

MoonWalker Series
Motor Controllers
User’s Manual
MW-MDC24D100S / MW-MDC24D100D
MW-MDC24D200S / MW-MDC24D200D
MW-MDC24D500S / MW-MDC24D500D
※ 사용자 매뉴얼에 포함된 정보는 정확하고 신뢰성이 있는 내용입니다. 그러나 출판 당시 발견되지 않은 오류가 있을 수 있으니 사용자는 자신의 제품 검증을 수행하시기 바라며, 전적으로 사용자 매뉴얼에 포함된 정보에 의존하지 마시기 바랍니다.
※ 본 사용자 매뉴얼는 엔티렉스의 MoonWalker 제어기를 올바르게 사용하기 위해 사용자가 알아야 할 내용들을 담고 있습니다. 이 메뉴얼은 MW DCS01, MW DCS02, MW DCM01, MW DCM02, MW DCL01, MW DCL02 제품에 공통으로 해당됩니다.
머리말 저희 엔티렉스는 여러분께 MoonWalker 시리즈라고 이름 붙여진 이 강력한 모터제어기를 소개할 수 있게 된 것이 정말 기쁩니다. 아마 귀하가 1개 혹은 2개의 DC 모터를 좀 더 강력하게 구동하기 위해 저희 제품을 선택하였다면 아주 올바른 선택이라고 자신합니다. MoonWalker 시리즈는 기본적으로 전류/속도/위치 제어기를 탑재하고 있어서 로봇 암이나 주행로봇, 산업용 기기 등을 연구부터 실제 응용까지 아주 광범위한 적용이 가능합니다. 저희가 제공하는 Motor Control UI 유틸리티를 사용하여 PC에서 손쉽게 제어기의 각 종 설정을 조절할 수 있으며 제어기의 상태 확인을 그래프로도 확인할 수 있습니다. 특히 직관적이고 손쉬운 다양한 구동 방식을 제공하므로 본 제품의 구매 후 간단히 제품의 연결에 관련된 내용을 숙지하고, 일반적인 시리얼 통신 포트나 혹은 Mini-USB 단자를 이용하여 PC와 연결한 후 Motor Control UI 유틸리티를 통해 내용을 확인하면 됩니다. 이렇게 괜찮은 가격에 좋은 프로그램을 번들로 제공할 수 있는 것이 저희도 역시 즐겁습니다. 기존의 제어기라는 개념이 아닌 단순한 DC 모터 구동용 드라이버만 가지고 무선 RC 조종기나 조이스틱을 이용하여 로봇을 구동하면서 부족한 기능에 실망하셨다면 역시 저희 MoonWalker 시리즈가 제공하는 솔루션에서 그 해답을 얻을 수 있을 겁니다. 간편히 PC와의 시리얼 통신을 통해서 원하는 제어를 설정한 다음 RC 조종기나 조이스틱을 이용하여 구동할 수 있게 되어 있습니다. 특히 조종기 레버의 감도 조절이나 다양한 안전상의 설정들을 확인할 수 있습니다. 또한, MoonWalker 시리즈는 단순히 Incremental형 엔코더뿐만 아니라 Absolute형 엔코더와 Tachometer, Potentiometer 등의 다양한 센서를 적용할 수 있습니다. 특히 Motor Control UI 유틸리티가 제공하는 Mini-C 컴파일러로 구현된 스크립트 기능을 Digital input/output과 Analog/Pulse input 단자와 함께 응용하면 별도의 중계용 보드와 같은 장치 없이 직접 구현이 가능합니다. 사용자 매뉴얼는 다음과 같은 순서로 구성되어 있습니다. 해당 글을 클릭하시면 설명페이지로 이동합니다. 차례 1. 소개 2. 전원 및 모터 연결 3. 통신 포트 연결 4. 센서 및 액츄에이터 연결 5. 모터의 안전한 사용을 위한 기본설정 6. 제어기의 구조 7. 모터제어기 8. 모터제어기 인터페이스 9. I/O 신호 처리 10. 제어기 오브젝트 11. 모터제어기 오브젝트 12. I/O 오브젝트 13. 통신 프로토콜 14. Mini-C 스크립트 언어 15. 프로그램의 작성과 실행 16. Motor Control UI 유틸리티 사용자 매뉴얼는 제어기의 데이터시트와 함께 제공됩니다. 데이터시트는 제어기 모델에 따른 정보를 가지고 있습니다. 제어기 모델에 따른 데이터시트는 다음 페이지에서 다운로드 하시기 바랍니다. MW-MDC24D100S datasheet 다운로드
마지막으로 저희 MoonWalker 시리즈를 선택해 주셔서 감사합니다. 그리고 그 선택에 절대 부족하지 않은 제품이라고 저희 엔티렉스는 자신합니다. 저희 제품에 대한 많은 응용 예제와 구동방법 및 기술 대응을 원하시면 엔티렉스 연구소 홈페이지(www.ntrexgo.com)에 있는 MoonWalker 카테고리를 방문하시기 바랍니다.
-사용자 매뉴얼에 대해 간단히 요약하고 제어기의 리셋 스위치와 표시등에 대해 설명
- 제어기에 전원(Power Source, 배터리 또는 파워서플라이)과 모터를 연결하는 방법과 연결 시 주의사항에 대해 설명합니다.
- PC나 마이크로컨트롤러를 제어기의 통신 포트(USB, RS-232, CAN)에 연결하는 방법에 대해 설명합니다.
- 제어기의 입출력 포트에 센서(Sensor)와 액츄에이터(Actuator), 기타 액세서리를 연결하는 방법에 대해 설명합니다.
- 모터의 제어 앞서 모터를 정격 범위 내에서 안전하게 구동하기 위한 구성 파라미터들을 올바르게 설정하는 것에 대해 설명합니다.
- 제어기의 내부 구조에 대해 설명합니다. 제어기의 내부 구조를 파악하는 것은 제어기를 올바르게 운용하는데 꼭 필요한 내용이므로, 사용자는 본 장의 내용을 숙지하기 바랍니다.
- 모터제어기의 폐루프 위치/속도/전류 제어기와 프로파일 생성기, 각종 오브젝트, 외부와 데이터 교환을 위한 입출력 버퍼에 대해 설명합니다.
- 모터제어기에 전달되는 명령과 피드백 신호의 처리에 대해 설명합니다.
- 제어기의 I/O 포트 기능과 사용 용도 그리고 I/O 신호처리 방법에 대해 설명합니다.
- 제어기의 제품 정보와 버전, 통신, 스크립트에 관련된 오브젝트들(상수와 명령, 상태, 구성 파라미터)에 대해 설명합니다.
- 모터 제어부의 구성 파라미터 설정 및 명령과 상태에 관련된 오브젝트들에 대해 설명합니다.
- 제어기의 입출력 채널에 관련된 오브젝트들에 대해 설명합니다.
- 제어기의 오브젝트 값을 읽고 쓰기 위한 통신 프로토콜에 대해 설명합니다.
- 제어기에 내장된 Mini-C 스크립트 언어에 대해 설명합니다 언어의 특징과 능력 그리고 어떻게 사용자 스크립트를 사용하는지에 대한 정보를 제공합니다.
- Mini-C 스크립트 언어를 이용해서 UI 유틸리티에 프로그램을 작성하여 제어기에 다운로드하고 실행하는 방법에 대해 설명합니다.
- Motor Control UI 유틸리티 사용법에 대해 설명합니다. UI 유틸리티를 이용해서 제어기 기능 설정 및 변경 방법, 모터와 I/O 포트 모니터링 방법, Mini-C 스크립트 실행 방법 등 대한 정보를 제공합니다.
MW-MDC24D100D datasheet 다운로드
MW-MDC24D200S datasheet 다운로드
MW-MDC24D200D datasheet 다운로드
MW-MDC24D500S datasheet 다운로드
MW-MDC24D500D datasheet 다운로드