RC 조종기나 조이스틱의 고급형 세팅 – Dead Band와 Linearity 설정
오늘 동영상 강의는 MoonWalker의 RC 조종기나 조이스틱의 조종 스틱의 감도를 조절하는 부분을 이야기하겠습니다.
먼저
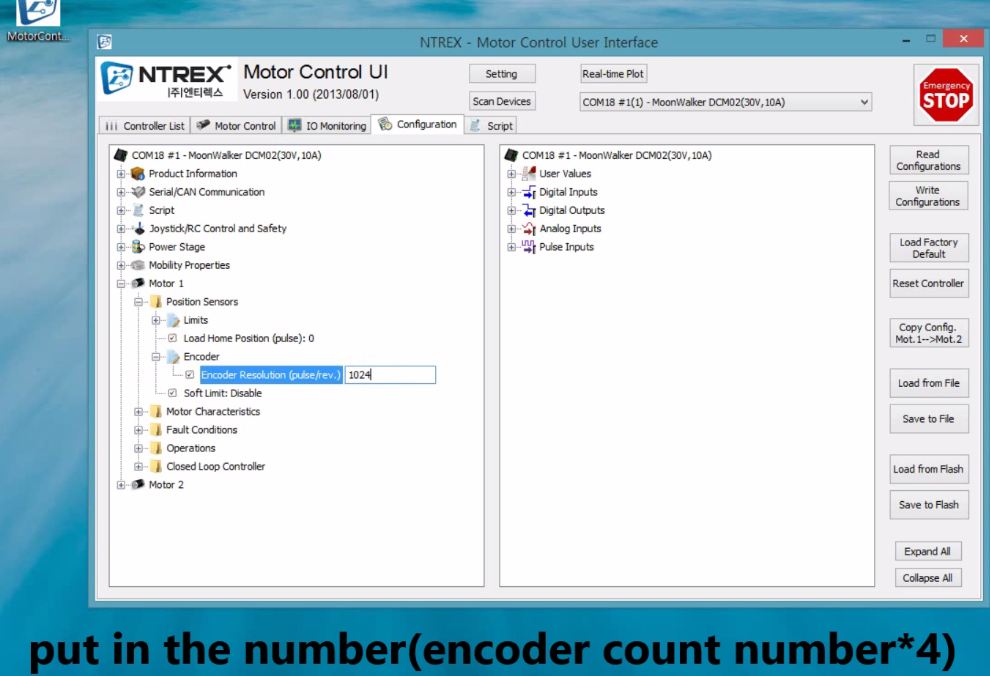
이제까지 별로 언급하진 않았습니다만, MoonWalker의 기능을 제대로 사용하실려면 모터의 특성을 MoonWalker에 알려주셔야합니다. 많은 것들이 있지만, 제대로 된 속도를 알고, 또 모터의 안전을 위해 세팅하는 부분을 아셔야지요. 일단 구동하실 모터에 연결된 엔코더의 분해능을 위 그림처럼 입력하셔야합니다. 이때 엔코더 분해능에서 *4를 하셔서 입력해주세요. 만약 256pulse의 엔코더라면 입력하실때는 1024로 입력하시면 됩니다.
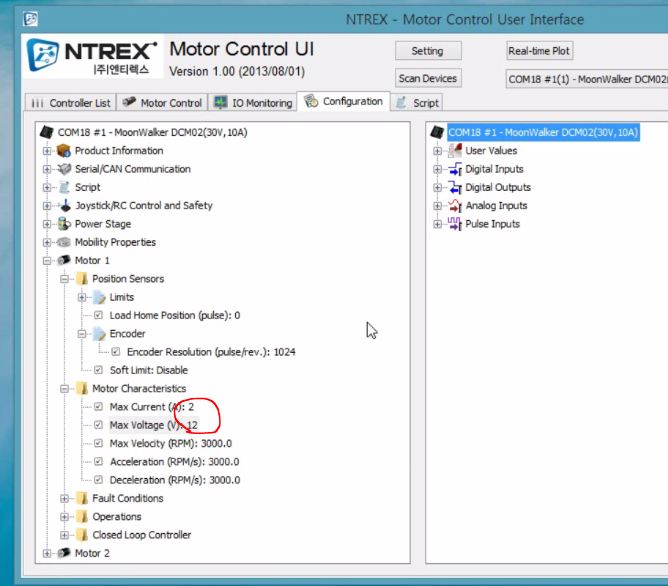
그다음은 모터에 인가되는 최대 전류의 한계치를 입력해 주세요. 모터가 데이터시트상에서 3A라고 하더라도 안전을 위해 2A정도로 인가해주시면 좋겠습니다. 저희 MW-MDC24D200D 모델의 경우 10A가 최대 허용치입니다만 그 이하도 다 사용할 수 있지요. 그리고 MoonWalker에 공급하는 전압도 알려주세요^^
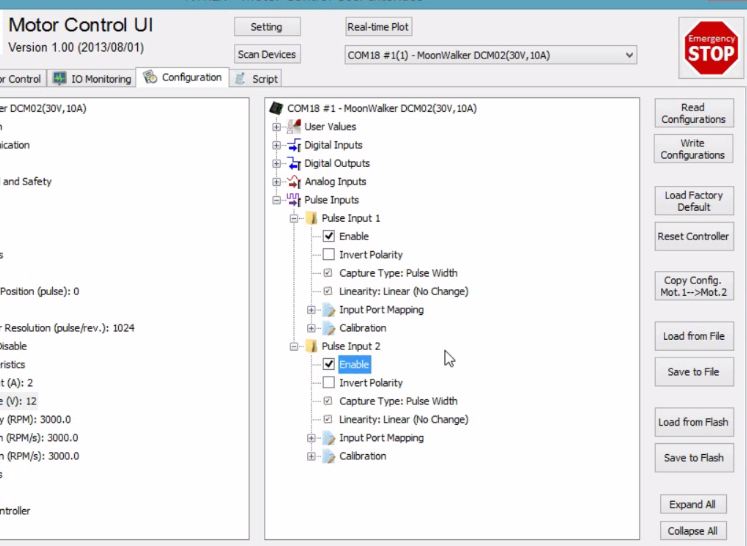
이제 연결된 모터의 채널별로 지난번 강좌에서 이야기했듯이[바로가기] Pulse Input을 enable시켜 주시면 됩니다. 설정을 다 마치시면 꼭 Write Configuration과 Save to Flash를 눌러주세요.
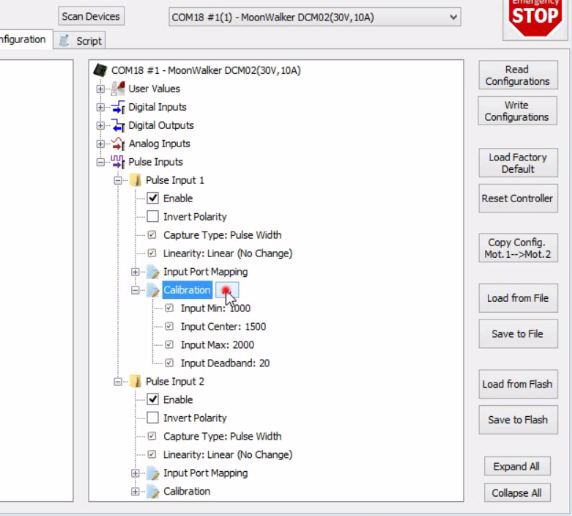
이제 오늘 이야기할 내용을 보죠. Pulse Input (만약 조이스틱이라면 Analog Input)의 Calibration 옆의 버튼을 눌러주시면
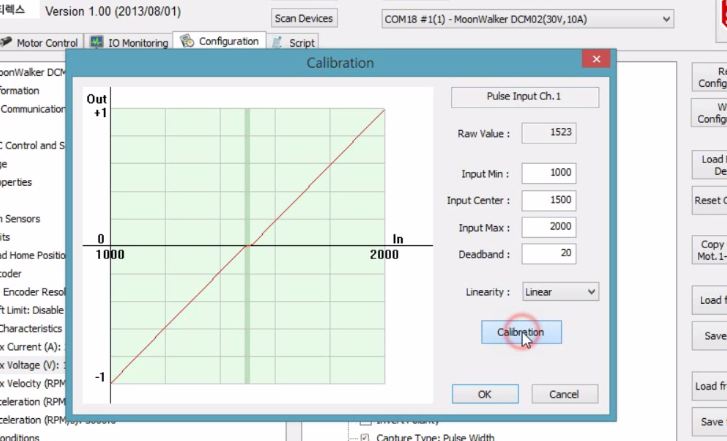
요런 창이 뜹니다. 여기서 Calibration 버튼을 누르고 조종기의 조종간을 움직여 보세요
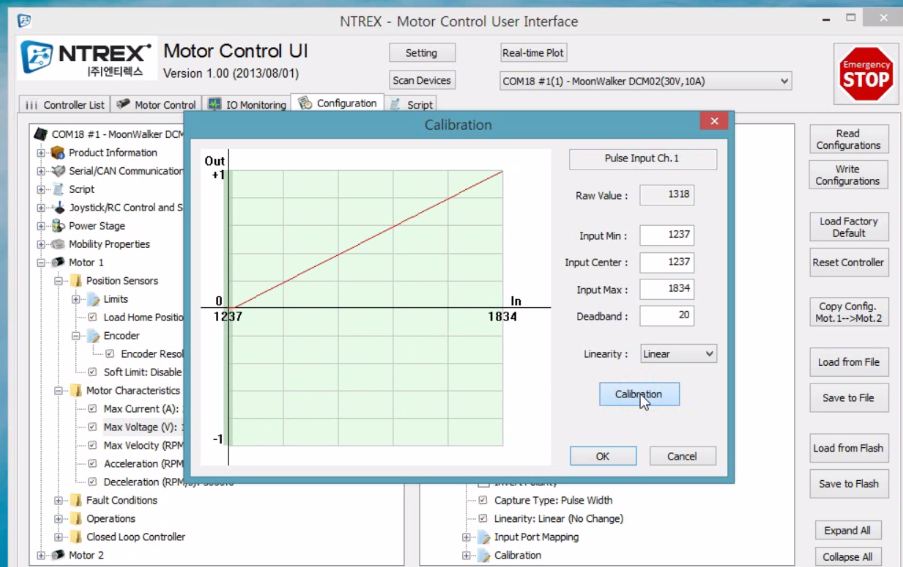
이렇게 그래프가 바뀌면서 현재 조종가의 입력값이 모니터링됩니다. 여기서 내가 가지고 있는 조종기의 입력 신호가 깨끗한지 정장인지 등도 확인할 수 있으며, 최대치와 최소치도 확인이 됩니다. 더불어서
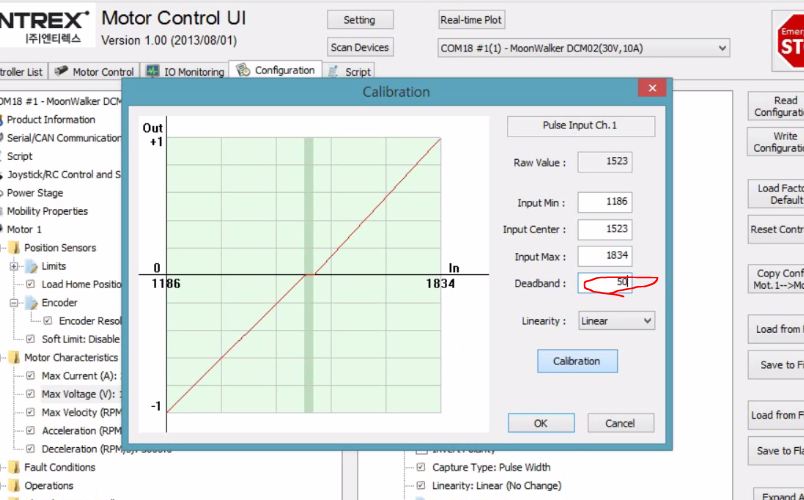
저 Dead Band 항목의 숫자를 조절하시면 Dead Band를 설정하게 되는데요. 원래 RC용 조종기들이 대체로 center에서 약간 불안하거나 딱 센터 값이 아니거나 뭐 이런게 있습니다. 고급 조종기들은 자체적으로 저 Dead Band를 조절할 수도 있습니다만, 저희 MoonWalker도 조절할 수 있도록 되어 있습니다.
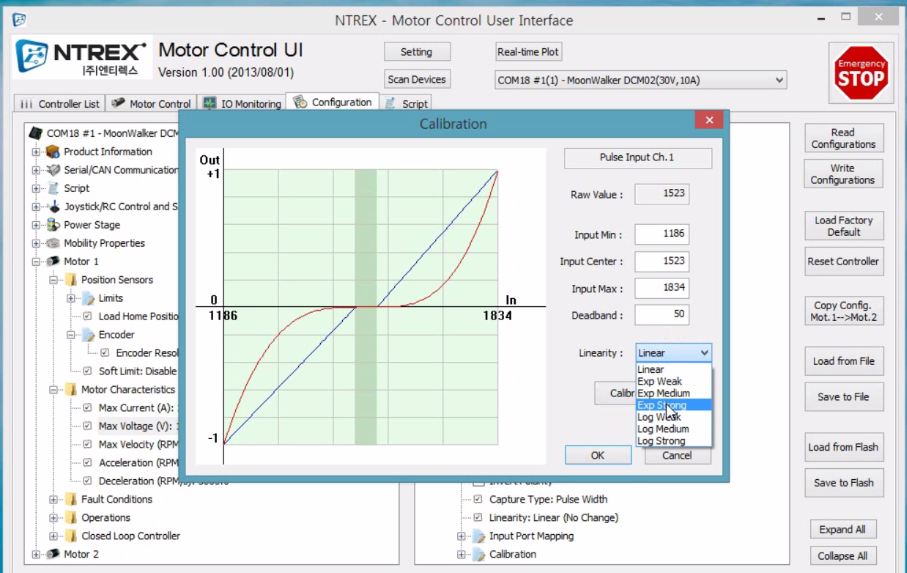
그 다음이 위에 보시는 Linearity입니다. 이건 조종기의 감도를 조절하는 중요한 요소 중에 하나인데요. 실제로 자작으로 자신이 만든 로봇에 RC 조종기를 세팅해서 동작시켜 보신 분들은 다 아시겠지만, 최대치 전압에 딱 맞추면 center 부근에서 너무 팍팍 움직여서 곤란한 적이 있지요. 그럴때는 위에 보이시는 Exp 형태로 Linearity를 맞추시면 됩니다. 그러면 center 부근에서 움직일때는 일반적인 경우보다 더 천천히 움직이고, 조종간을 끝까지 밀면 최대로 움직이도록 설정이 되지요. 그 반대의 경우가 Log입니다.
이렇게 저희 MoonWalker는 조종간 신호에 대한 감도를 조절하는 기능도 탑재했으니 실제 주행로봇등을 자작하시는 경우에 꽤 유용할 것입니다. 아~ 한번더 말씀드립니다만, 꼭… 설정후에는 Device에 설정치를 전송하는 Write Configuration을 하시고, 또 전원을 off한후 다시 on했을때도 최종 설정으로 움직이길 바라시는 경우는 Save to Flash를 하세요. 안그러면 잘 설정하신 다음 다시 전원을 인가할때 설정을 다시 해야한답니다.^^ 이제 동영상으로 강의를 보세요^^


