커넥터 종류 및 제품설명
현재..디바이스마트 에서 가장 많이 공급 되고 있는 커넥터 종류에 대해 알아보자.
커넥터는 접속 형태에 따른 분류로 크게 4가지로 나눠 진다.
1.WIRE TO WIRE 커넥터
전선 대 전선을 접속 할때 쓰이는 커넥터
2.WIRE TO BOARD 커넥터
전선 대 보드를 접속 할때 쓰이는 커넥터
3. BOARD TO BOARD 커넥터
보드 대 보드를 접속 할때 쓰이는 커넥터
4. FFC / FPC 커넥터
지금 이 시간에는 WIRE TO BOARD 커넥터 종류에 대하여 소개를 할려고 한다.
자. 이제 시작해 봅시다..^^
커넥터는 크게 MALE(암),FEMALE(수) 이렇게 구분을 짓는다.
커넥터 MALE은 보드에 부착한 상태 에서 커넥터 FEMALE 을 커넥터 MALE에
접속 하면 그 기능을 100% 발휘 한것이다.
WIRE TO BOARD 커넥터는 각 제조사 마다 제품명이 틀리다.
몰렉스 커넥터 같은 경우 상품명을 거의 숫자로 표기를 해준다.
EX) 5264-02면 앞에 붙는 5264는 상품명 이고 뒤에 붙는 02는 핀수를 의미한다.
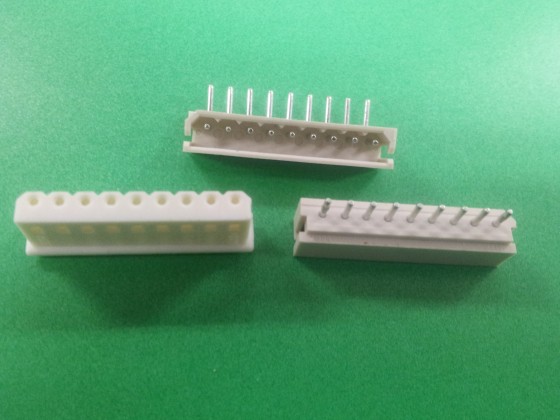
자..이제 가장 기본적인 WIRE TO BOARD 커넥터 이미지 및 제품 설명을
시작해 보겠습니다.

제일 왼쪽에 자리 잡고 있는 커넥터 5264-00 MALE 타입
가운데 와 오른쪽에 자리 잡고 있는 커넥터는 5268-00,5267-00 FEMALE 타입
여기서 잠깐.. 5268-00, 5267-00 같은 FEMALE 타입 인데 제품 모양이 약간 다르죠?^^
그 이유는 잠시 뒤에 알려 드리겠습니다..
바로 PCB에 FEMALE을 고정 했을때.. 위로 보고 있는지 앞으로 보고 있는지..^^
5268-00을 우리는 라이트앵글(꺾인 타입), 5267-00을 스트레이트 타입 이렇게
부르고 있다.
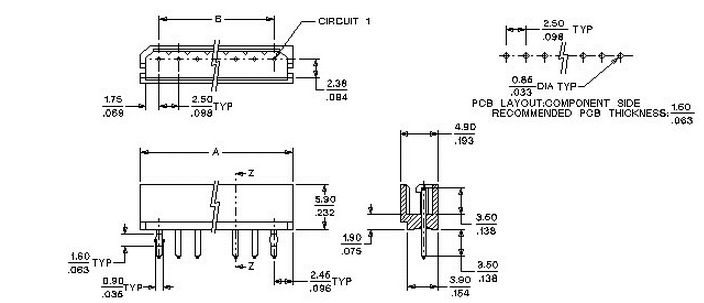
일반적으로 많이 쓰이는 커넥터는 핀 과 핀 사이 다리 간격은 2.54mm로 정해져 있다.
아래 도면은 5267-00,5268-00 관련 참고 자료로 도움이 될거 같아 올려줍니다..^^
휴대용 미니 오실로스코프 DSO NANO V3 출시! (V2의 후속모델)

1. 간단한 제품 소개
DSO NANO는 대륙의 SeeedStudio가 ARM Cortex M3기반으로 제작한 1채널 오실로스코프입니다.
1MHz 디지털 스토리지 오실로스코프 DSO NANO V3는 호환 32비트 디지털 저장 및 다양한 기능을 가지고 있으며
크기가 작고 간단하게 작동할 수 있어서 학교 실험실이나 전기 가구 수리, 전기 공학쪽의 수요를 만족하기에 적합한 제품입니다.
- 디스플레이 : 전체 색상 2.8 ” TFT LCD 320 X 240 컬러
- SD 카드, USB 포트 및 충전
- 수평 감도 : 지표와 조정
- 파형 저장 : 마이크로 SD 카드를 USB를 통해 • PC 연결 : 같은 SD 카드 리더
- 전원 공급 장치 : 500mAh 3.7V 리튬 배터리 / USB
- 업그레이드 : USB
- 신호 생성기 내장
- 200khz 아날로그 대역폭
2. DSO NANO V2 & V3 의 차이점
(1) 디자인 및 재질

DSO NANO V2

DSO NANO V3
기존에 흰색 플라스틱 쉘을 사용하였던 V2와 다르게 V3는 더 섬세하고 내구성이 강한 검은색 금속 쉘을 사용했습니다.
(2) 도면 비교 ( SIZE가 약간 작아졌어요)


DSO NANO V2 : 95mm x 62mm x 13mm
DSO NANO V3 : 91mm x 62mm x 13mm
3. 마지막으로 V3의 포장된 사진 투척!

BLDC모터드라이버 NVIS BLSM030R 사용기

안녕하세요 오늘 소개해드릴 제품은 이번에 새로 출시된 BLCD모터 드라이버인 NVIS-BLSM030R입니다 .

바로 요녀석 인데요 출력전류 최대 30A에 400W급 BLDC모터를 돌릴수 있다고 메뉴얼에 나와있네요.
직접 확인을 해보기 위하여 400W급 모터를 준비하였습니다

바로 이모터인데요 품명은 TM90-D0431 DC24V / 400W / 3000rpm 을 자랑하는 90각대형 BLDC모터입니다.
자세한 스펙은 모터명을 클릭하시면 볼 수 있습니다.
모터에 여러선이 달려있는데요 데이터시트를 참고하여 각 선의 역할을 잘 숙지해 놓도록 합니다.
이제 이 모터구동을위한 작업에 착수하겠습니다.
먼저 보이는 사진은 NVIS BLSM030R을 구입하시게 되면 따라오는 부속품들입니다.
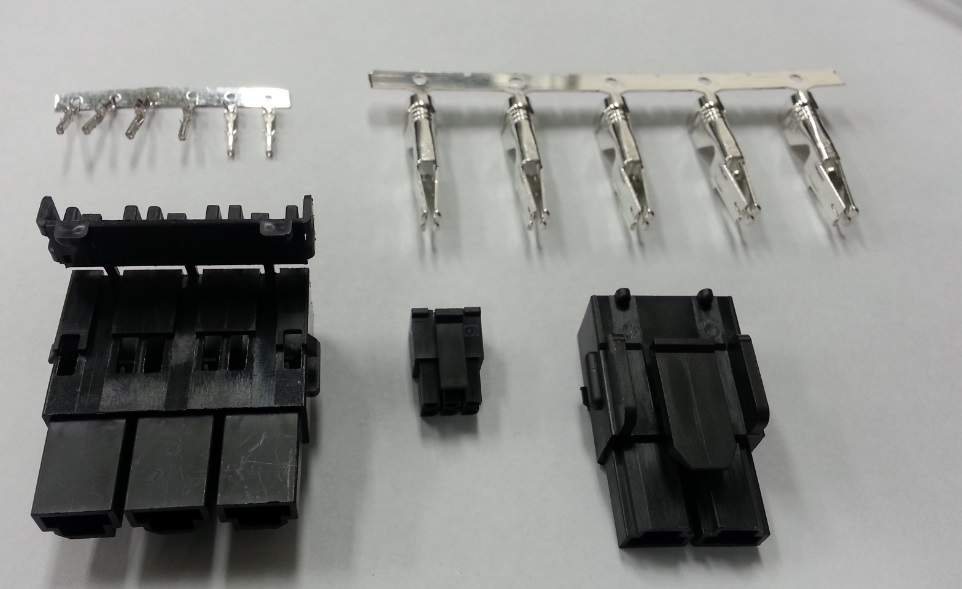
2종류의 클림프와 3종류의 커넥터가 부속품에 포함되어있는데요 맨왼쪽에 보이는 가장 큰 커넥터는 모터에 연결시키는 커넥터로 모터의 A,B,C상과 맞춰주시면 되고, 가운데 가장 작은커넥터는 모터의 HALL SENSOR에 연결을 마지막 맨오른쪽 커넥터는 전원연결을 위한 커넥터입니다. 메뉴얼을 참고하며 커넥터 조립을 해 보도록 하겠습니다.
아래사이트로 접속하면 관련자료 다운받기로 데이터시트를 얻을수 있습니다.
먼저 클림프를 손으로 잡고 살살살 흔들어주면 똑! 하고 떨어지게됩니다.

이제 이 클림프를 전선과 연결을 시켜줍니다.
먼저 전원접속용으로 만들어 보겠습니다.
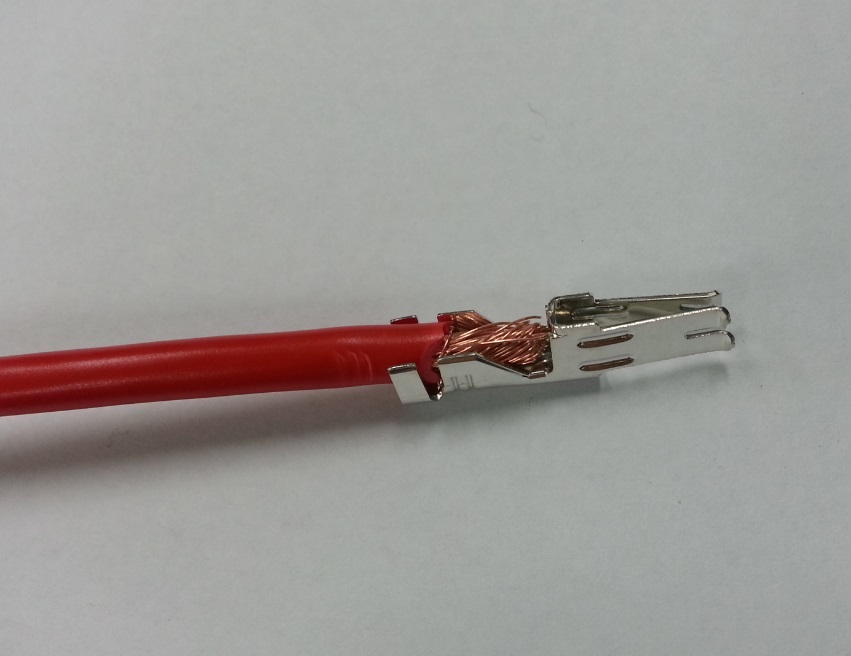
그림과 같이 클림프 위에 선을 얹어놓고 압착기를 사용하여 눌러주면
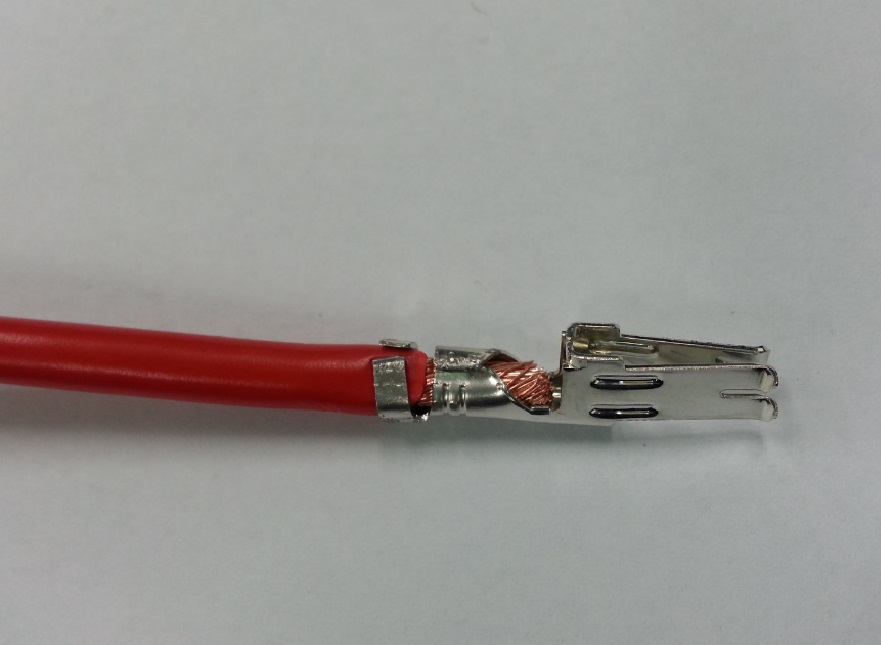
이렇게 조립이 됩니다.
그리고 커넥터에 방향에 맞게 넣어주면
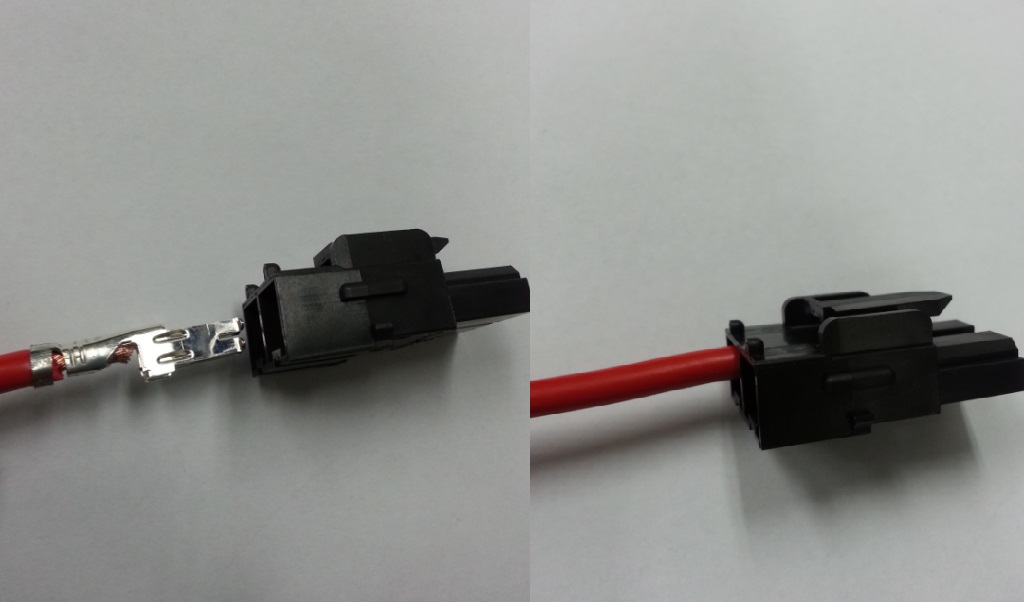
완료입니다. 마찬가지로 한개를 더 만들어서 다른한 쪽도 연결해주시면됩니다.
또한 모터에연결되있는 A,B,C상 선과 홀센서선 역시 같은방법으로 메뉴얼에 나와있는 신호에 맞추어 연결해주시면 됩니다.
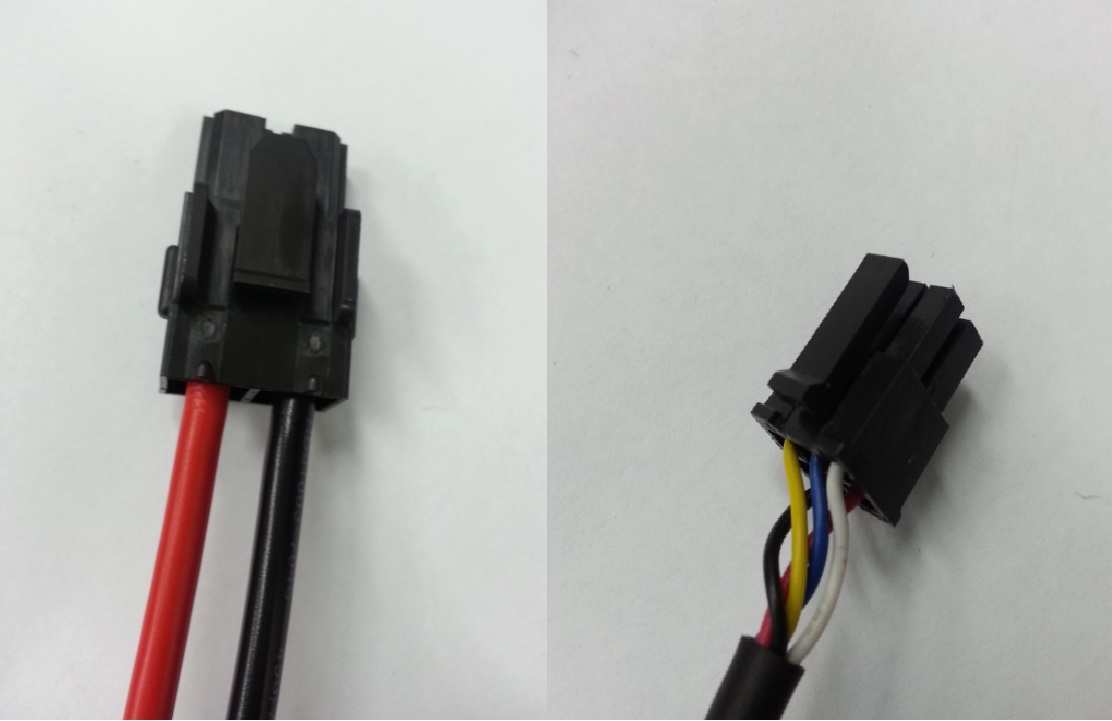
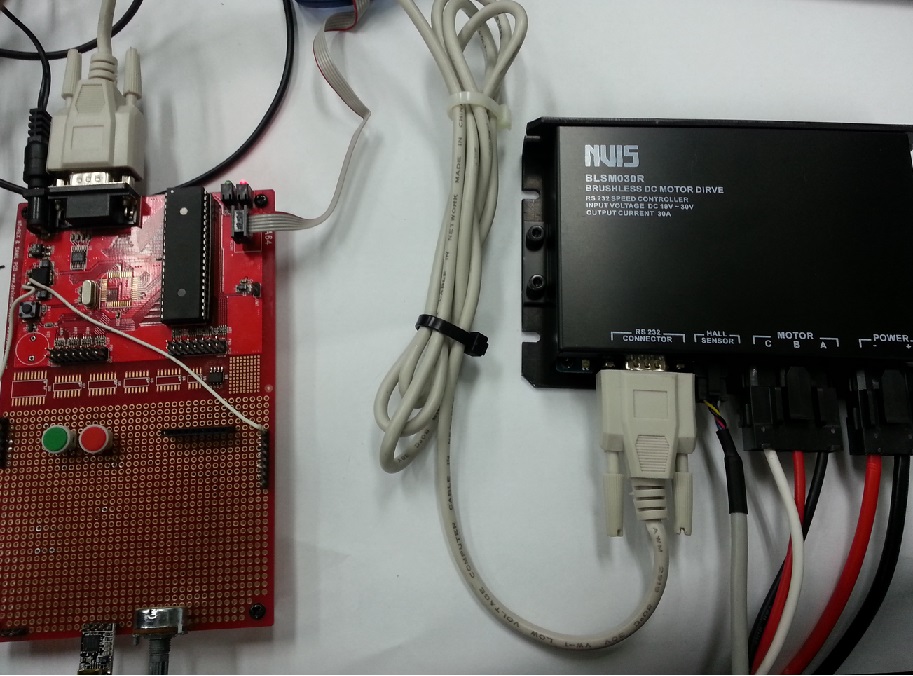
그럼 접속커넥터 연결을 위한 준비가 다 되었으니 BLSM030R과 연결을 해주도록 합니다.
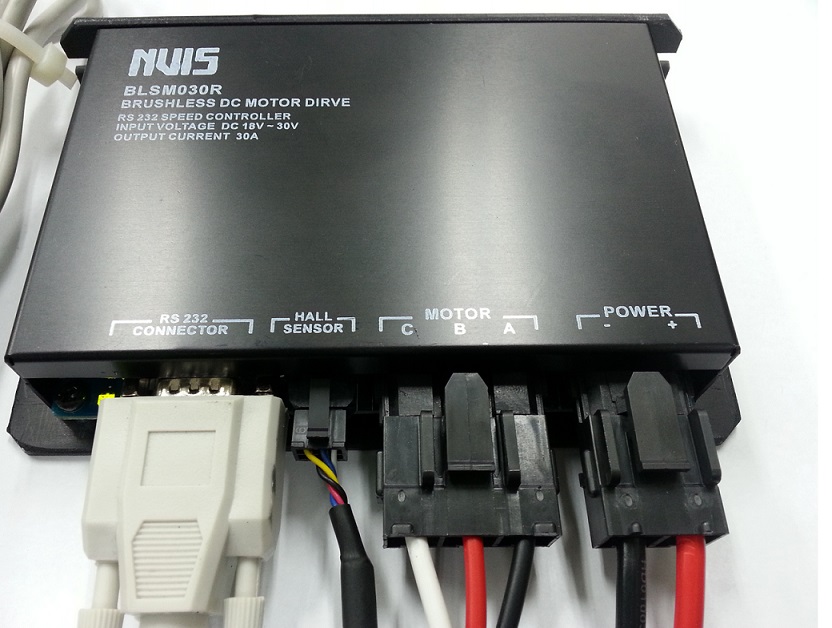
이게 연결을 완료한 모습입니다.
오른쪽 RS232통신 케이블은 컨트롤보드와 연결하기위해 사용하였습니다. 컴퓨터로 제어를 원하신다면 RS232선과 컴퓨터를 연결해 주시면 됩니다.
혹은 더 간단하고 편하게 BLSM030R을 구동하고 싶으시다면,
저희 제품인 터미널명령입력기 NT-PortChecker(자세한 내용 및 사용법은 클릭) 를 이용하시면 가장 쉽게 구동하실수 있습니다.
(이유는 BLSM030R의경우 반복명령이 필요한데 이 반복명령을 손쉽게 입력할 수 있는 프로그램이기 때문입니다.)
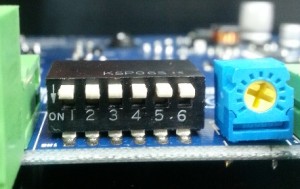
자, 다시 넘어가면 모터드라이버의 접속단자부분 맨왼쪽을 보시면 스위치와 LED가 있습니다 .

LED는 전원이 인가되면 사진처럼 노란색 불빛이 들어오며, 컨트롤보드와 통신을 할때는 노란색불이 깜박이게 됩니다.
LED가 정상적으로 깜박인다면 통신이 잘 되고있다는 뜻입니다.
또한 위에 보이는 스위치는 모터를선택하고 통신속도를 설정하는 부분인데 저는 스위치1,2를 모두 OFF시키므로 57600Bps의 통신속도를 설정하였으며, TM90-D0431[400W]모터를 사용하였으므로 3번스위치를 ON 시켜주었습니다.
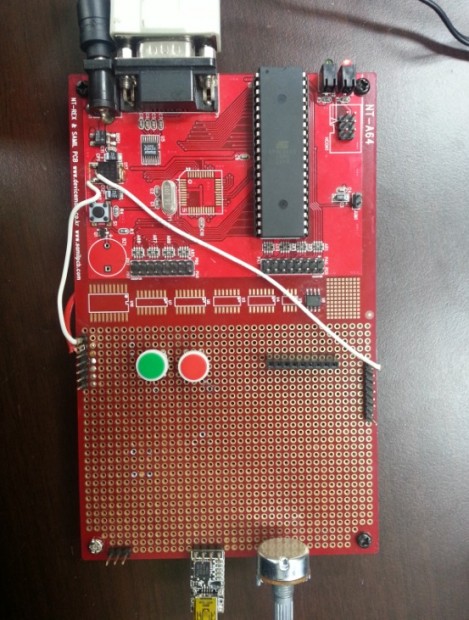
또한 모터구동을 위한 컨트롤보드는 저만의 만능기판인 NT-A64-BOARD를 사용하였습니다
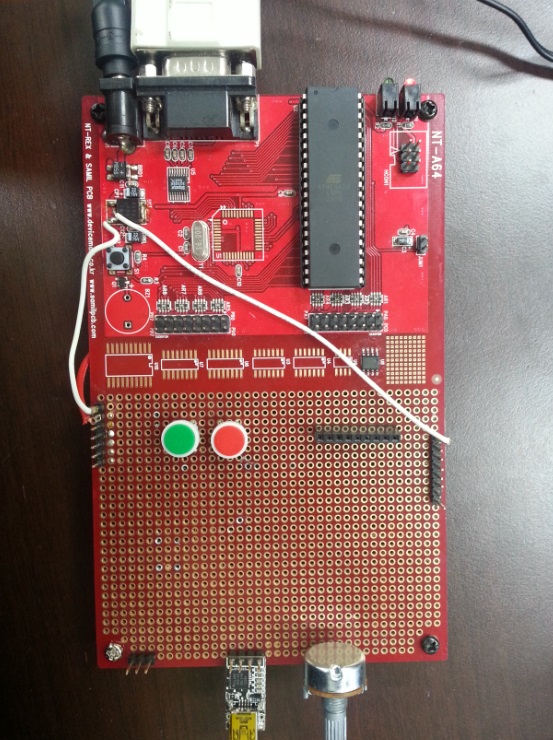
초록색 스위치는 모터의 정/역회전을 컨트롤하기위해 연결하였으며 빨간색 스위치는 모터의 Enable/Disable명령을 위해 연결하였습니다.
가변저항은 ADC변환을통해 모터의 속도를 조절하기 위해 연결하였습니다.
MCU는 ATMEGA16을 이용하였고 자세한 동작방법은 아래 예제소스를 참고하시기 바랍니다.
NT-BLSM030R 예제소스
/********************************************************************************
Title : BLSM030R 모터드라이버 TEST Code
MCU : Atmega16
외부 xtal : 16MHz
File Name : bldc.c
Data : 2013/03/12
Notice : 아래 코드는 BLSM030R 모터드라이버 TEST 프로그램이며
이 프로그램을 이용하여 발생하는 모든 문제에 대해서는
(주)엔티렉스에서는 어떠한 법적 책임도 지지 않습니다.
참고
1. 정/역회전 스위치 = PORTB.2연결
2. 모터 Enable/Disable 스위치 = PORTD.3연결
3. 모터속도제어용 가변저항 = PORTA.0연결
*******************************************************************************/
#include <avr/io.h>
#include <avr/interrupt.h>
#include <util/delay.h>
volatile unsigned char motor_dir = 0, motor_ena = 0;
void putchar(char i)
{
while((UCSRA & 0×20)==0×00); // UDR이 비었으면 송신 가능
UDR=i;
}
//////////////////모터 제어용 함수 ///////////////////////
void motor_enable(void) // Motor Enable 함수.
{
putchar(0×02); // ASCII(STX)-START
putchar(‘C’); // Command
putchar(‘M’); // Motor
putchar(‘E’); // Enable
putchar(0×03); // ASCII(ETX)-END
}
void motor_disable(void) // Motor Disable 함수
{
putchar(0×02);
putchar(‘C’);
putchar(‘M’); // Motor
putchar(‘D’); // Disable
putchar(0×03);
}
void brake_enable(void) // Brake enable 함수
{
putchar(0×02);
putchar(‘C’);
putchar(‘B’); // Brake
putchar(‘E’); // Enable
putchar(0×03);
}
void brake_disable(void) // Brake Disable 함수
{
putchar(0×02);
putchar(‘C’);
putchar(‘B’); // Brake
putchar(‘D’); // Disable
putchar(0×03);
}
void motor_rpm_dir(unsigned int rpm, unsigned char dir) // 모터 방향 및 속도(r/min)명령 함수
{
unsigned int rpm_temp;
rpm_temp = rpm;
putchar(0×02);
putchar(‘C’);
putchar(‘R’);
if(dir)
putchar(‘+’); // 정방향
else
putchar(‘-’); // 역방향
putchar(rpm_temp/1000 +’0′); // 모터속도명령(입력 범위 0~3000(r/min))
rpm_temp%=1000;
putchar(rpm_temp/100 +’0′);
rpm_temp%=100;
putchar(rpm_temp/10 +’0′);
putchar(rpm_temp%10 +’0′);
putchar(0X03);
}
void motor_acc_set(unsigned char level) // 모터 가속시간 명령함수.
{
putchar(0×02);
putchar(‘C’);
putchar(‘A’); // Acceleration
putchar(level/10+’0′); // 입력범위 1~20
putchar(level%10+’0′);
putchar(0×03);
}
void motor_dec_set(unsigned char level) // 모터 감속시간 명령함수.
{
putchar(0×02);
putchar(‘C’);
putchar(‘D’); // Deceleration
putchar(level/10+’0′); // 입력범위 1~20
putchar(level%10+’0′);
putchar(0×03);
}
///////////////// Main /////////////////////
int main(void)
{
int ad_val;
DDRD=0xf6; // PORTD 0,3 입력으로 사용. PORTD.0(RXD)
PORTD = 0×08;
DDRA=0xF0; // PORTA.0 입력으로 사용
DDRB=0×00; // PORTB.2 입력으로 사용
PORTB=0×04;
ADMUX=0×00; // ADC0 단극성 입력 선택
ADCSRA=0xC7; // A/D변환 허용, 분주비 128,
_delay_ms(5);
UCSRB = (1<<RXEN)|(1<<TXEN); // 수신 송신 enable.
UCSRC = (1<<UCSZ1)|(1<<UCSZ0); // 전송데이터 비트수 =8비트.
UBRRH =0;
UBRRL = 16; // 전송속도 : 16Mhz에서 BAUD= 57600bps,비동기 일반모드.
motor_enable(); //모터 Enable
_delay_ms(10);
brake_disable(); //브레이크 Disable
_delay_ms(10);
motor_acc_set(2); //모터가속시간(2 -> 0.5sec)
_delay_ms(10);
motor_dec_set(2); //모터감속시간(2 -> 0.5sec)
_delay_ms(10);
while(1)
{
ADCSRA = 0xC7; // ADEN=1, ADSC =1 변환시작
while((ADCSRA & 0×10) == 0); // ADIF =1이 될때까지
ad_val = (int)ADCL + ((int)ADCH<<8);
if((PIND & 0×08) == 0) // 모터 Enable/Disable스위치 (PORTD.3)
{
_delay_ms(300);
if(motor_ena)
{
motor_ena = 0;
motor_disable();
_delay_ms(10);
}
else
{
motor_ena = 1;
motor_enable();
_delay_ms(10);
}
}
if((PINB & 0×04) == 0) // 정/역 스위치(PORTB.2)
{
_delay_ms(300);
if(motor_dir)motor_dir = 0;
else motor_dir = 1;
}
motor_rpm_dir(ad_val*3,motor_dir); // 역방향 (ADC값*3)rpm으로 회전.
_delay_ms(10);
}
}
NT-BLSM030R과 NT-A64-BOARD를 연결한 모습입니다
그리고 아래사진은 마지막으로 전원(27V)을 인가해주고 모터와의 연결까지 완료된 상태입니다.

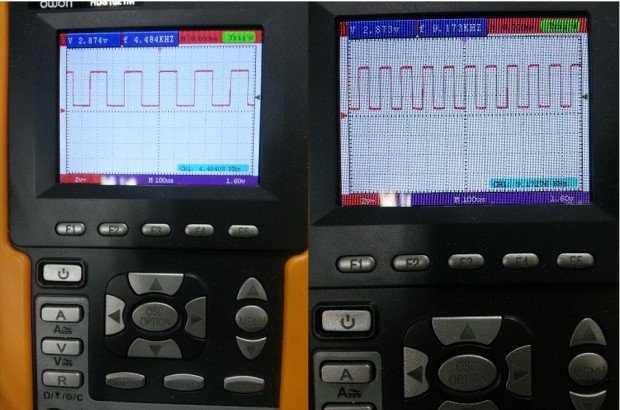
모든준비가 완료되었으니 이제 프로그램을 writing하여 동작을 시켜보겠습니다.
보시는바와 같이 정상적으로 동작이 잘됩니다.
어렵고 복잡하지 않고 오직 간단한 연결작업과 프로그래밍을 통해 누구나 손쉽게 모터를 제어할 수 있는거 같습니다.
초보자들도 누구나 쉽게 사용할 수 있는 NT-BLSM030R 을 한번 이용해보시기를 적극 추천합니다.
스텝모터 드라이버 NT-BST2406 사용기

안녕하세요. 바이폴라 스테핑모터를 컨트롤할 수 있는 드라이버에 대해 소개하고자 합니다.
저희 회사에서 개발한 스테핑모터는 여러 종류가 있는데요 차이점은 얼마만큼의 용량을가진 모터를 구동시키느냐의 차이일 뿐 구동방식은 똑같습니다.
그중 오늘은 가장 최근에 출시된 제품인 NT-BST2406을 파헤쳐 보겠습니다.
NT-BST2406
Bipolar MicroStepping Drive 라는 뜻을 가지고있는 이 모터드라이버는 2상 바이폴라 PWM정전류 쵸퍼 방식으로 구동됩니다.
모터드라이버의 자세한 스펙 및 설정법은 아래 링크에 접속하시면 메뉴얼을 받을수 있습니다.
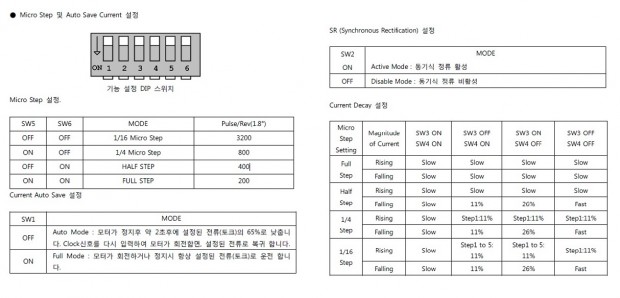
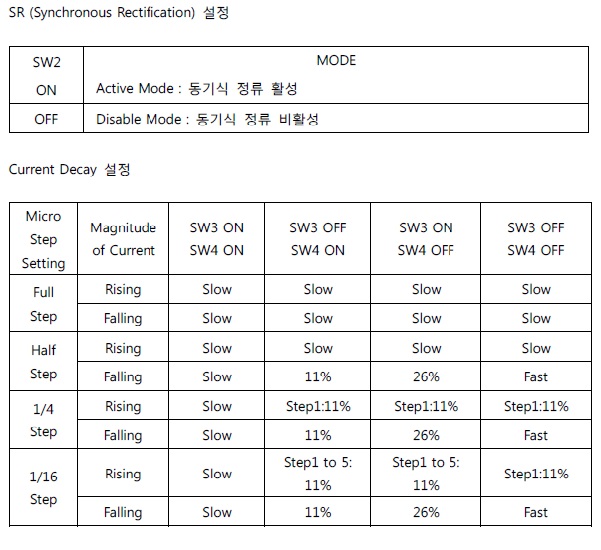
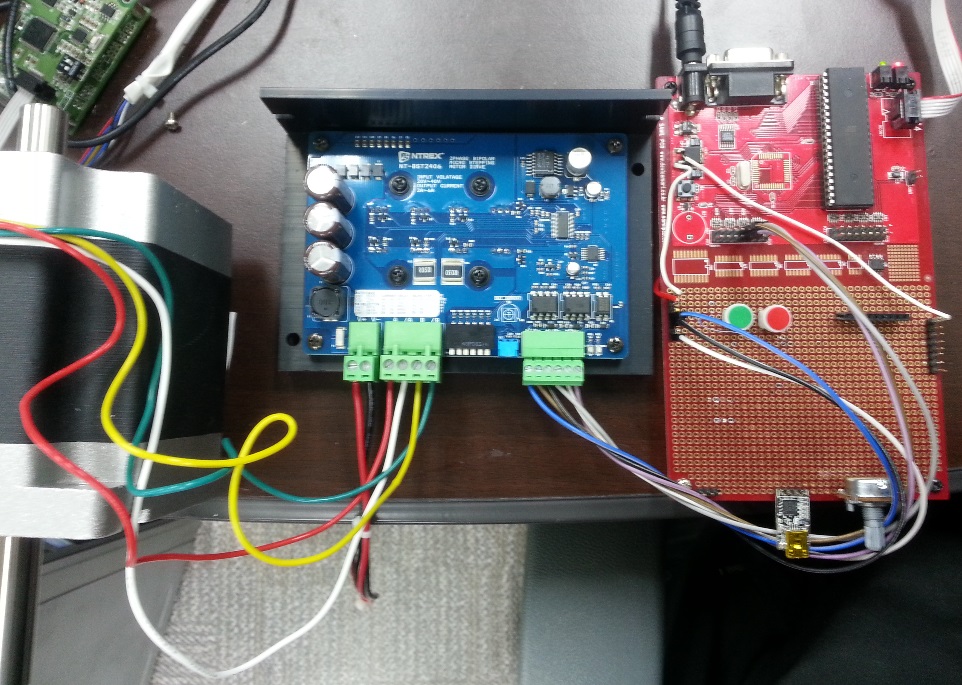
메뉴얼에 나와있는 입력전압으로 보아하니 어느정도 덩치가 나가는 모터도 구동시킬수 있을 것 같은 느낌이 들것입니다. 그래서 이번 구동을 위해 선택한 모터! 바로 FL110STH99-5504B 라는 110각 2상 스테핑 모터입니다.!! 아래 사진에서 보듯 어마어마한 크기를 가지고 있는 스테핑모터입니다.(사진에서 알 수 있듯 크기만큼이나 무게도 장난이 아니라는…..) 먼저 모터구동에 앞서 모터드라이버의 외형 및 각 부분의 기능을 살펴보도록 하겠습니다. 아래는 NT-BST2406의 제품의 외형 사진입니다. 설명을 위해 사진에 번호를 매겨봤습니다. 먼저 그림에서 보이는 1번은 전원 입력커넥터로써 전원입력장치로부터 18V~40V의 +,-전원을 입력시켜 주는 부분이고, 계속해서 3번은 기능설정 딥 스위치로써 Micro Step설정 및 Current Auto Save설정 과 SR(Synchronous Rectification)설정 그리고 Current Decay설정을 할 수 있는 스위치입니다. 아래 그림을 보면 이해가 편하실겁니다. 저는 구동을 위해 모든스위치를 OFF시킨 모드로 설정을 하였습니다. 그리고 바로 옆에보이는 4번 가변저항의 용도는 전류 설정용 가변저항으로 스테핑모터의 입력전류에 맞게 설정(2A~6A)할 수 있습니다. 이 때 주의해야 할 점은!! 허용전류보다 높게 설정할 경우 모터가 진동 또는 탈조할 수 있으므로 모터사양에 맞게 적절한 전류를 설정하여야 한다는 점입니다!! 마지막 5번커넥터는 SIGNAL 입력 커넥터로써 모터의 진행방향(DIRECTION), Enable/Disable, 그리고 Clock신호를 입력하는 부분입니다. 각 입력신호의 +부분은 5V레벨 전원에 연결하고, -부분은 오픈 콜렉터 신호를 연결합니다. 이제 NT-BST2406의 이론적 지식을 간단하게나마 습득하였으니 본격적으로 구동을 시켜보겠습니다. 구동을 위한 저만의 만능기판 NT-A64-BOARD입니다 …^^ MCU는 ATMEGA16을 사용중이며 AVR stdio4를 사용하여 소스작성을 하였습니다. 구동이 목적이기에 약간 너저분한점은….이해해주시리라 생각합니다 ^^ 어쨋든 ! 아래 첨부한 간단한 구동프로그램 작성 후 26V의 전원을 넣고 구동을 시켜본 결과 !! 파형은 아주 잘~~나옵니다. 물론 구동도 잘~~됩니다 /*========= Include =========*/ #include<avr/io.h> volatile unsigned char data; DDRA=0xF0; sei(); return 0; ISR(ADC_vect) 나름 설명한다고 노력하였으나 아직 글쓰기실력이 아직 많이 부족하다고 생각합니다. 그래도 앞으로 점점 발전해 나갈 것을 약속드리며 바이폴라 스테핑모터구동을 위한 드라이버로써 NT-BST2406 을 적극 추천해드리며 마치겠습니다. ^.^
(모터의 자세한 스펙은 디바이스마트 홈페이지에서 확인하시길 바랍니다…^^;;)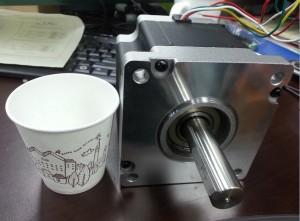
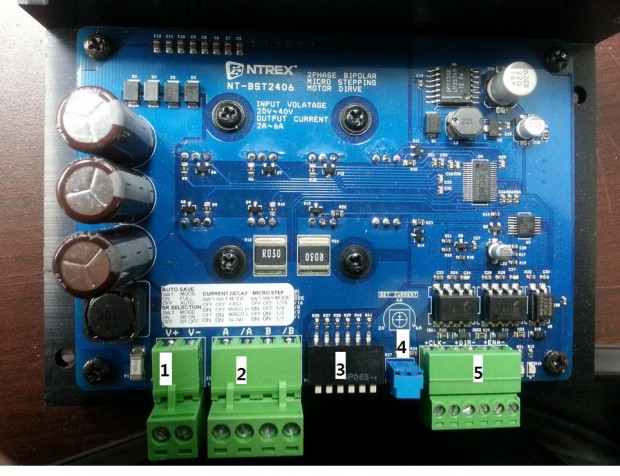
2번은 모터 출력 커넥터로써 각각의 스테핑모터의 데이터시트를 참고하여 A상과 B상을 각각 알맞게 연결해주면 되겠습니다.

DIR(DIRECTION)신호는 LOW level일 경우 정방향, HIGH level일 경우 역방향으로 회전합니다.
ENA(Enable)신호는 LOW level일 경우 모터드라이버가 Enable되고, HIGH level일 경우 Disable이 되어 동작하지 않습니다.

모든신호의 (+)단자는 +5V에 연결하였고
DIR의(-)와 초록색스위치는 PORTB.2에 연결하여 버튼을 눌렀다 떼었다를 하며 모터의 진행방향이 바뀌도록 설정하였고,
ENA의(-)와 빨간색스위치는 PORTD.3에 연결하여 Enable/Disable을 선택하도록 설정하였으며,
ADC변환을 통해 CLK신호를 조절하여 모터의 속도제어를 위해 가변저항과 CLK(-)신호는 PORTB.3(OCR0)에 연결하였습니다.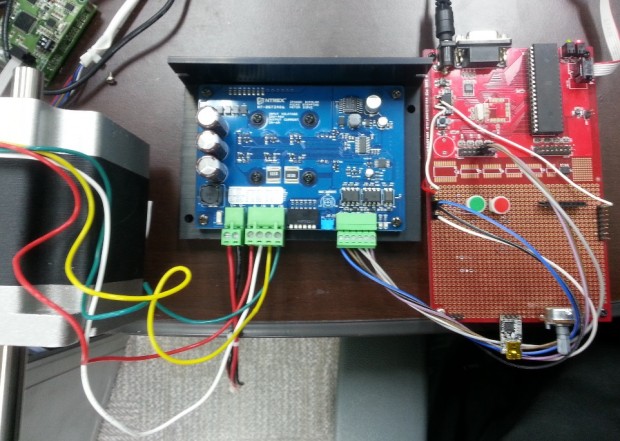
간단한 예제소스
#include<util/delay.h>
#include<avr/interrupt.h>
//////////MAIN/////////////
int main(void)
{
DDRB = 0xFB;//PORTB를 출력으로 설정.
TCCR0 = 0b00011010; //CTC 모드, OC0셋,clk분주비 8
ADMUX = 0b00100000; //AREF 에 입력 되는 외부 전압 사용, ADC 데이터 우측 정렬, PIN ADC0 (PA0) 아날로그 입력,ADCH 상위부터 8비트 사용.
ADCSRA = 0b11101111; //ADC Enable, Free Running Mode, ADC Interrupt Enable, 128 분주
while(1)
{
OCR0=data;
}
}
{
data = (int)ADCH+((int)ADCL<<8); //ADC 데이터 저장
}
{kind=link}
{kind=link}
[레이저가공] 모터 마운트. 손쉬운 제작 방법!


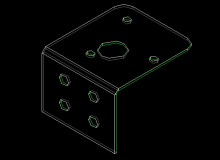
사용하고자 하는 모터를 환경에 따라 알맞게 고정용 마운트를 구하이 어려워 사용하기 어려우셨죠?
이제 고민하지 마세요! 커스텀 서비스를 통하여 어떤 모터 마운트라도 만들 수 있습니다.


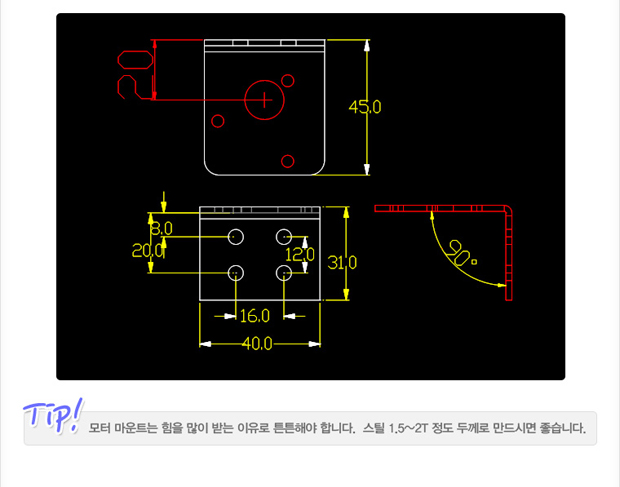
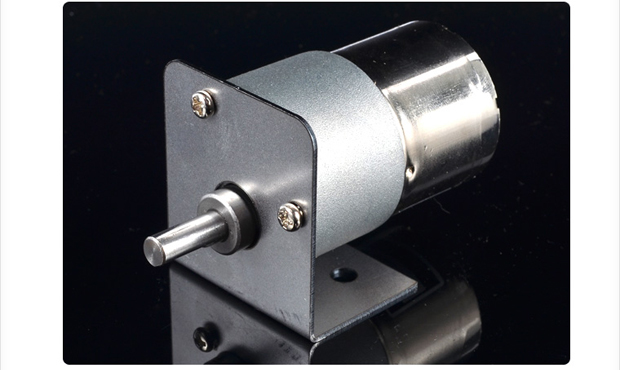
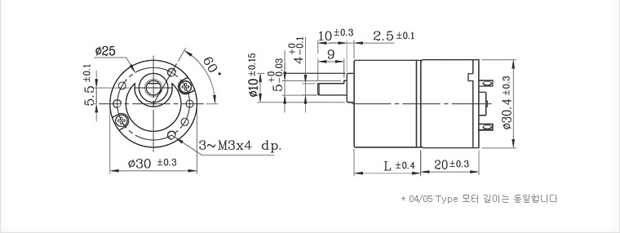
RB-35GM 01TYPE 12V 1:50 기어비의 모터를 선택하여 만들어 보겠습니다.

마운트의 절곡 방향과 모터 방향을 잘 확인하여 작성합니다.

[레이저 가공, 판재 가공 참고글]
[판재가공 활용편]
 |
프로파일 Color 아노다이징프로파일을 원하는 색상으로 아노다이징 도금하여 사용해보세요. 디바이스마트를 이용하시면 보다 편리합니다. |
 |
프로파일 안전가이드 레이저가공 판재가공 아노다이징 활용편레이저 판재가공을 활용하여 프로파일 안전가이드 만들기. 디바이스마트 커스텀서비스를 이용하면 원하는 것을 손쉽게 만들어 볼 수 있습니다. |
 |
레이저가공(Razer)DIY(프로파일) 가공 활용 하기비철금속 판재 레이저절단 절곡 가공을 통하여 안전 가이드를 만들어 보도록 하겠습니다. 가공 후 날카로운 모서리 부분을 가리면서 동시에 포인트 를 줄수 있는 가공을 예로
|
 |
노트북 쿨러! 판재 가공으로 손쉽게!판재 레이저가공을 통하여 나만의 노트북 쿨러를 손쉽게 만들어 보세요. 디자인 성능 기능 모두 생각대로! |
 |
판재가공의 절곡 이란? [레이저 가공]판재가공의 절곡을 이해하기 위해서는 절곡기의 형태와 금형을 참고하시면 좋습니다. 판재가공의 디자인 설계자는 반드시 알아야하며, 가공의 난이도를 조정하여 단가를 조정할 수 있습니다. |
 |
조립하기 [레이저 가공] 무선 주행로봇을 만들어 보세요.
도면 견적 후 발주하여 가공품을 조립합니다. 아래 버튼으로 과정 단계별 설명페이지 이동이 가능합니다.
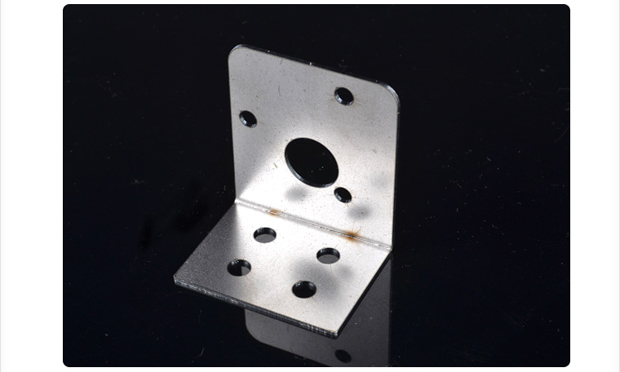
6. 가공 완료 / 조립 하기 코팅제 또는 스틸의 경 우 착색 도색을 사용하며, 알미늄의 경우 아노다이징 처리를 합 니다. 알미늄은 가벼우며 튼튼하고 아노다이징 색이 좋아 많이 사용합니다. 스틸은 가격이 가장 저렴한 자재로 일반적으로 많이 사용되며 도색 가공을 추가 하거나, 직접 도색을 해도 문제 없습니다. 직접 도색은 통풍이 잘되는 그늘에서 얇게 분사하여 충분히 건 조 시킨후 다시 얇게 분사 하는 과정을 2~4회 정도 반복합니다. 한번에 많은 양을 분사하면 골고루 도색이 되지 않거나 얼룩이 생기며, 일부분이 마르면서 두꺼워져 버립니다. 2~4회 도색-건 조 과정 이후에는 마감제(=투명락카)를 2회… |
 |
프레임 발주하기 [레이저 가공] 무선 주행로봇을 만들어 보세요.
이전 포스팅에서는 프레임 구상 편을 작성 하였습니다. 이번 작성 내용은 CAD 도면으로 견적/발주 내용을 정리하겠습니다.
4. CAD 도면 그리기 도면 조립 옆면 입니다. 홀 가공 위치를 꼭 표시하셔야 조립도 에서… |
 |
프레임 그리기 [레이저 가공] 무선 주행로봇을 만들어 보세요.튼튼한 금속바디를 만들어 하나뿐인 주행로봇을 만들어 보세요! 스캐치편. |
 |
[레이저 가공] 아크릴 절단 서비스커스텀 아크릴 절단 서비스 입니다. |
 |
배터리 케이스 활용[레이저 가공]디바이스마트 레이저 판재가공 샘플 서비스를 통하여 다양한 케이스를 만들 수 있습니다. |
 |
모터 마운트. 손쉬운 제작 방법![레이저가공]레이저 가공 서비스를 통하여, 모터 마운트를 손쉽게 만들 수 있습니다. |
| [youtube http://www.youtube.com/watch?v=UHITBB8TjhA&w=220&h=160] |
레이저 절단 절곡 샘플가공 서비스 Custom Service레이저 절단, 절곡 비철금속 가공 서비스 입니다. |